PLC模拟量闭环控制系统的基本原理
时间:12-14
来源:互联网
点击:
PLC虽然是在开关量控制的基础上发展起来的工业控制装置,但为了适应现代工业控制系统的需要,其功能在不断增强,第二代PLC就能实现模拟量控制。当今第四代PLC已增加了许多模拟量处理的功能,完全能胜任各种较为复杂的模拟控制,除具有较强的PID控制外,还具有各种各样专用的过程控制模块等。近年来PLC在模拟量控制系统中的应用也越来越广泛,已成功地应用于冶金、化工、机械等行业的模拟量控制系统中。
PLC模拟量闭环控制系统的基本原理
输入信号和输出信号均为模拟量的控制系统称为模拟量控制系统。过程控制系统是指被控制量为温度、压力、流量、液位、成份等这一类慢连续变化的模拟量控制系统。
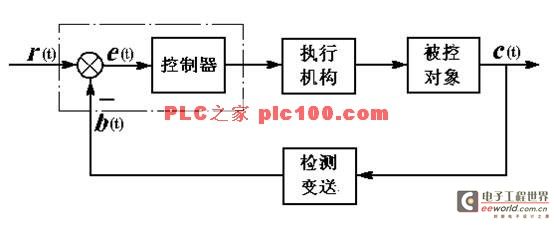
如图所示为典型的模拟量闭环控制系统结构框图。图中,虚线部分可由PLC的基本单元加上模拟量输入/输出扩展单元来承担。即由PLC自动采样来自检测元件或变送器的模拟输入信号,同时将采样的信号转换为数字量,存在指定的数据寄存器中,经过PLC运算处理后输出给执行机构去执行。
因此,要将PLC应用于模拟量闭环控制系统中,首先要求PLC必须具有A/D和D/A转换功能,能对现场的模拟量信号与PLC内部的数字量信号进行转换;其次PLC必须具有数据处理能力,特别是应具有较强的算术运算功能,能根据控制算法对数据进行处理,以实现控制目的;同时还要求PLC有较高的运行速度和较大的用户程序存储容量。现在的PLC一般都有A/D和D/A模块,许多PLC还设有PID功能指令,在大、中型PLC中还配有专门的PID过程控制模块。
PLC模拟量闭环控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)