基于M0TM固态继电器的汽车系统
时间:12-16
来源:互联网
点击:
前言
汽车系统控制模块包括各种精挑细选的固态继电器,以便评测系统相对于指定负载、任务剖面和边界条件的运行可靠性。
意法半导体的汽车固态继电器是一个智能电源开关,主要是采用M0TM 技术研制,额定负载驱动能力为0.1安培至数十安培。过载和短路容错功能采用限流和限制功率方法,以集成电路形式实现。这些功能的设计意图是保证汽车系统的任务剖面,避免故障检测发生错误,同时防止短路和过载冲击驱动器和线束。在瞬变条件下(灯泡接通涌流、电机起动电流等…),防护功能可能会降低负载性能。因此,评测带负载的驱动器功能是十分必要的。此外,要设定软件的故障处理性能,需要对诊断行为进行全面分析。
最后,智能功率执行器,例如,智能保险,本身就具有电流-时间曲线特性,要想优化线径,就必须测试这类器件。
功率芯片的参数,例如,工艺角参数、极限边界条件和负载参数,以及最恶劣条件,都是设计时需考虑的因素。在台架实验中,需要很长时间才能等到最恶劣条件重现,获得多个工艺角批次芯片。
TWISTER是意法半导体开发的一个仿真器,能够为开发人员提供精确的M0-5/M0-5E、M06、M07高边驱动器、Omnifets、H桥产品和最常用汽车负载的行为模型,对带负载的驱动器进行完整的系统级仿真。为展示该开发工具的功能和特性,本文将简要介绍智能驱动器的特性,并给出几个车身驱动器的评估实测。
1. M0TM 智能固态继电器
高边驱动器 (HSD)、低边驱动器(LSD)和智能开关是为恶劣的汽车工作环境设计的半导体器件,能够承受所有的可能发生的故障状况,例如,短路或过载现象。同时,行业法规要求必须测试当错误、短暂故障和/或电磁干扰导致继电器关断时是否为零风险。评测结果必须符合汽车产品标准。智能开关的保护策略可能影响负载性能,因此,产品选型不仅考虑开关在稳态时的行为,还要考虑其在保护电路激活时的瞬间行为表现。
1.1. 短路保护
两级限流功能和一个功率限制功能确保开关在短路和过载条件下可靠工作,达到AEC-Q100-012汽车产品质量标准:
• 选择限流参数高值(ILimH),以符合目标负载的涌流限制,同时,还应避免在涌流或短路期间电流密度过大,导致在功率MOSFET源极金属层上引起电迁移。
• 限流低值(ILimL) 约是IlimH的30%,当短路持续存在时,激活限流低值机制,以终止电迁移效应。
• 功率限制功能用于限制短路或过载期间的最大平均功率,避免开关金属层温度瞬间骤变超过60K。快速热瞬变可能在焊点和源极金属层上引起热机械应力。为确保汽车任务剖面,最大60K的 TJ热变是意法半导体可靠性设计原则。
1.2. 负载兼容性
限流和功率限制功能可导致车灯开启延迟,多数车企能够接受在最恶劣情况下车灯开启延迟最长10ms的方案,评测最恶劣情况需要使用工艺角批次参数。涉及的主要参数包括限流最小值(ILimH min)、在TFILAMENT=-40oC时的灯泡涌流最大值。
当驱动电机、阻性负载和感性负载时,需要给予类似的考虑。这些负载的涌流很大,可能使用短驱动脉冲,所以需要检测驱动器的尺寸,主要是在瞬变条件下。
1.3. 电流-时间曲线
短路和过载的反应时间与短路电阻是函数关系。为什么保护策略要采用限流和限温两种策略呢?因为反应时间不仅受到芯片参数离散的影响,还受到温度边界条件的影响(见图1)。

图1: 电流-时间曲线与短路电阻是函数关系,红色区域代表因芯片参数离散和温度边界条件而引起的所有的可能的变化。
2. TWISTER概述
图2所示是Twister图形用户界面的主窗口。直接点击相应的图标即可选择并设置电源电压、线束、汽车负载和控制输入。每个输入输出值都可选择,并绘制成可缩放的图形。数据导出功能支持多种文件格式。下面是该仿真环境的主要功能:
• 选择功率芯片和相关参数(见图4)
• 设置PCB散热系统温度(见图4)
• 设置电池电压
• 设置电池极性接反电压
• 设置输入电压
• 设置环境温度
• 选择负载 (R, RC, RL/电流/功率分布图、直流电机、12V & 24车灯)
• 设置仿真时间
• 绘制与电和温度相关的所有输入输出变量曲线图
• 评测相对于负载阻抗的电流-时间曲线

图2: Twister主窗口: 点击芯片图片,即可打开芯片、负载、输入、Vbat电压选择菜单
3. 负载兼容性评测示例
本示例测试一个驱动10W转向灯的140m? 高边驱动器VNx7140Ax,在所有最恶劣情况下,测评必须满足下列条件:
结温 < 热关断阈值
1) 导通< 10ms时的功率限制时长
图3所示是评测电路连接配置图,而图4是芯片选型窗口,用户可在这里设置最恶劣条件下的芯片参数和边界条件。
当环境温度是规定的最高温度时,如果热关断阈值和ILimH 限流参数高值均最低的工艺角批次芯片导通,就会发生结温达到热关断值的重大风险(见图5) .
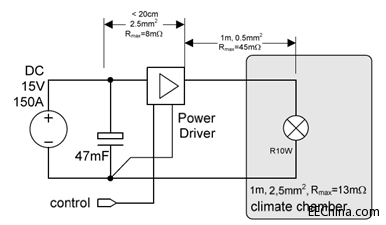
图3: MO-7VNx7140Ax 转向灯高边驱动器最恶劣情况评测电路连接配置示例.

图4: 芯片选型菜单中最恶劣条件评测参数设置
在导通时引起最长功率限制时间的最恶劣条件有两个特征:环境温度= -40oC,产品数据手册中的最小 ILimH值。灯泡涌流在-40oC时最高。两个并联的H6W 灯泡的涌流可达到15A。这个参数结合ILimH=8A将在导通时产生最长功率限制时间, 结果车灯开启时间被延迟。如图6所示,在最恶劣条件下,VNx7140AX功率限制时间在3ms(3ms < 10ms)范围内。
图7所示是在Twister上进行最恶劣条件评测的全部评测结果。如果需要,用户可向意法半导体车身产品部索取给定情况的概率评测静态数据。
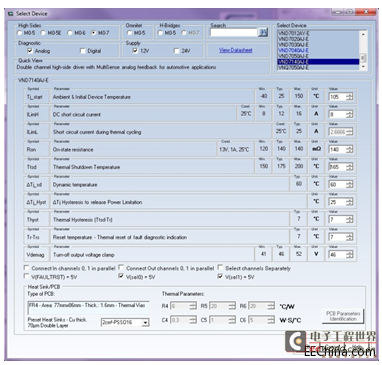
图 5: TAMB=105oC时的VNX7140AX行为。在TTSD=167oC和ILimH=8A时发生热关断 (根据产品销售数据,概率 < 0.1ppm)

图 6: VNX7140AX驱动2支H6W转向灯的IOUT& TJ 仿真曲线(ILimH=8A, TAMB=-40oC)。
4. 保护分析和线径优化
图8中的红色曲线代表20m?? MO-7高边驱动器VND720AJ反应时间测试数据。将这条在Twister中取得的曲线导出后并另存为Excel表格文件,然后,将其分别与21W+21W+5W车灯和线径0.5 mm2 铜导线的电流-时间曲线对比(见图8)。这个分析的目的是检查负载、驱动器和线束之间层级是否正确。这里必须说明的是,在没有外部器件帮助的条件下,高边驱动器的IRMS电流始终低于线径0.5 mm2 铜导线上的最大IRMS电流,因此,在任何情况下,该芯片都能保护线束。此外,还可以通过软件交互进一步控制电流,实现t>1s的延迟(图8中的虚线)。在这种情况下,通过微控制器控制,该芯片可以保护线径0.35mm2 的铜线。
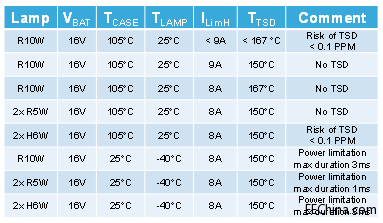
图 7: VNX7140AX重启后热保护评测。注:M0-7高边驱动器还能设成锁保护模式,当TJ 达到 TTSD时,芯片将被锁保护。
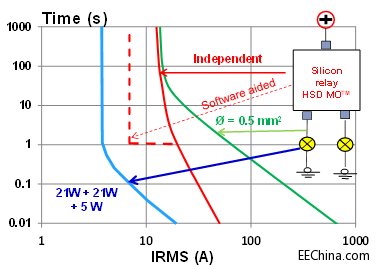
图 8: VND7020AJ M0-7固态继电器和灯泡及线径的电流时间曲线比较
5. 结论
Twister是一个独立的好用的功率芯片仿真器,准许用户查看所有可能的边界条件和芯片参数对设计的影响;热电混合仿真准许用户评测MOTM驱动器在最恶劣条件下的性能表现。此外,Twister还准许用户利用目标保护策略计算并优化线径。
汽车系统控制模块包括各种精挑细选的固态继电器,以便评测系统相对于指定负载、任务剖面和边界条件的运行可靠性。
意法半导体的汽车固态继电器是一个智能电源开关,主要是采用M0TM 技术研制,额定负载驱动能力为0.1安培至数十安培。过载和短路容错功能采用限流和限制功率方法,以集成电路形式实现。这些功能的设计意图是保证汽车系统的任务剖面,避免故障检测发生错误,同时防止短路和过载冲击驱动器和线束。在瞬变条件下(灯泡接通涌流、电机起动电流等…),防护功能可能会降低负载性能。因此,评测带负载的驱动器功能是十分必要的。此外,要设定软件的故障处理性能,需要对诊断行为进行全面分析。
最后,智能功率执行器,例如,智能保险,本身就具有电流-时间曲线特性,要想优化线径,就必须测试这类器件。
功率芯片的参数,例如,工艺角参数、极限边界条件和负载参数,以及最恶劣条件,都是设计时需考虑的因素。在台架实验中,需要很长时间才能等到最恶劣条件重现,获得多个工艺角批次芯片。
TWISTER是意法半导体开发的一个仿真器,能够为开发人员提供精确的M0-5/M0-5E、M06、M07高边驱动器、Omnifets、H桥产品和最常用汽车负载的行为模型,对带负载的驱动器进行完整的系统级仿真。为展示该开发工具的功能和特性,本文将简要介绍智能驱动器的特性,并给出几个车身驱动器的评估实测。
1. M0TM 智能固态继电器
高边驱动器 (HSD)、低边驱动器(LSD)和智能开关是为恶劣的汽车工作环境设计的半导体器件,能够承受所有的可能发生的故障状况,例如,短路或过载现象。同时,行业法规要求必须测试当错误、短暂故障和/或电磁干扰导致继电器关断时是否为零风险。评测结果必须符合汽车产品标准。智能开关的保护策略可能影响负载性能,因此,产品选型不仅考虑开关在稳态时的行为,还要考虑其在保护电路激活时的瞬间行为表现。
1.1. 短路保护
两级限流功能和一个功率限制功能确保开关在短路和过载条件下可靠工作,达到AEC-Q100-012汽车产品质量标准:
• 选择限流参数高值(ILimH),以符合目标负载的涌流限制,同时,还应避免在涌流或短路期间电流密度过大,导致在功率MOSFET源极金属层上引起电迁移。
• 限流低值(ILimL) 约是IlimH的30%,当短路持续存在时,激活限流低值机制,以终止电迁移效应。
• 功率限制功能用于限制短路或过载期间的最大平均功率,避免开关金属层温度瞬间骤变超过60K。快速热瞬变可能在焊点和源极金属层上引起热机械应力。为确保汽车任务剖面,最大60K的 TJ热变是意法半导体可靠性设计原则。
1.2. 负载兼容性
限流和功率限制功能可导致车灯开启延迟,多数车企能够接受在最恶劣情况下车灯开启延迟最长10ms的方案,评测最恶劣情况需要使用工艺角批次参数。涉及的主要参数包括限流最小值(ILimH min)、在TFILAMENT=-40oC时的灯泡涌流最大值。
当驱动电机、阻性负载和感性负载时,需要给予类似的考虑。这些负载的涌流很大,可能使用短驱动脉冲,所以需要检测驱动器的尺寸,主要是在瞬变条件下。
1.3. 电流-时间曲线
短路和过载的反应时间与短路电阻是函数关系。为什么保护策略要采用限流和限温两种策略呢?因为反应时间不仅受到芯片参数离散的影响,还受到温度边界条件的影响(见图1)。
图1: 电流-时间曲线与短路电阻是函数关系,红色区域代表因芯片参数离散和温度边界条件而引起的所有的可能的变化。
2. TWISTER概述
图2所示是Twister图形用户界面的主窗口。直接点击相应的图标即可选择并设置电源电压、线束、汽车负载和控制输入。每个输入输出值都可选择,并绘制成可缩放的图形。数据导出功能支持多种文件格式。下面是该仿真环境的主要功能:
• 选择功率芯片和相关参数(见图4)
• 设置PCB散热系统温度(见图4)
• 设置电池电压
• 设置电池极性接反电压
• 设置输入电压
• 设置环境温度
• 选择负载 (R, RC, RL/电流/功率分布图、直流电机、12V & 24车灯)
• 设置仿真时间
• 绘制与电和温度相关的所有输入输出变量曲线图
• 评测相对于负载阻抗的电流-时间曲线
图2: Twister主窗口: 点击芯片图片,即可打开芯片、负载、输入、Vbat电压选择菜单
3. 负载兼容性评测示例
本示例测试一个驱动10W转向灯的140m? 高边驱动器VNx7140Ax,在所有最恶劣情况下,测评必须满足下列条件:
结温 < 热关断阈值
1) 导通< 10ms时的功率限制时长
图3所示是评测电路连接配置图,而图4是芯片选型窗口,用户可在这里设置最恶劣条件下的芯片参数和边界条件。
当环境温度是规定的最高温度时,如果热关断阈值和ILimH 限流参数高值均最低的工艺角批次芯片导通,就会发生结温达到热关断值的重大风险(见图5) .
图3: MO-7VNx7140Ax 转向灯高边驱动器最恶劣情况评测电路连接配置示例.
图4: 芯片选型菜单中最恶劣条件评测参数设置
在导通时引起最长功率限制时间的最恶劣条件有两个特征:环境温度= -40oC,产品数据手册中的最小 ILimH值。灯泡涌流在-40oC时最高。两个并联的H6W 灯泡的涌流可达到15A。这个参数结合ILimH=8A将在导通时产生最长功率限制时间, 结果车灯开启时间被延迟。如图6所示,在最恶劣条件下,VNx7140AX功率限制时间在3ms(3ms < 10ms)范围内。
图7所示是在Twister上进行最恶劣条件评测的全部评测结果。如果需要,用户可向意法半导体车身产品部索取给定情况的概率评测静态数据。
图 5: TAMB=105oC时的VNX7140AX行为。在TTSD=167oC和ILimH=8A时发生热关断 (根据产品销售数据,概率 < 0.1ppm)
图 6: VNX7140AX驱动2支H6W转向灯的IOUT& TJ 仿真曲线(ILimH=8A, TAMB=-40oC)。
4. 保护分析和线径优化
图8中的红色曲线代表20m?? MO-7高边驱动器VND720AJ反应时间测试数据。将这条在Twister中取得的曲线导出后并另存为Excel表格文件,然后,将其分别与21W+21W+5W车灯和线径0.5 mm2 铜导线的电流-时间曲线对比(见图8)。这个分析的目的是检查负载、驱动器和线束之间层级是否正确。这里必须说明的是,在没有外部器件帮助的条件下,高边驱动器的IRMS电流始终低于线径0.5 mm2 铜导线上的最大IRMS电流,因此,在任何情况下,该芯片都能保护线束。此外,还可以通过软件交互进一步控制电流,实现t>1s的延迟(图8中的虚线)。在这种情况下,通过微控制器控制,该芯片可以保护线径0.35mm2 的铜线。
图 7: VNX7140AX重启后热保护评测。注:M0-7高边驱动器还能设成锁保护模式,当TJ 达到 TTSD时,芯片将被锁保护。
图 8: VND7020AJ M0-7固态继电器和灯泡及线径的电流时间曲线比较
5. 结论
Twister是一个独立的好用的功率芯片仿真器,准许用户查看所有可能的边界条件和芯片参数对设计的影响;热电混合仿真准许用户评测MOTM驱动器在最恶劣条件下的性能表现。此外,Twister还准许用户利用目标保护策略计算并优化线径。
固态继电器TWISTER汽车系统仿真 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)