基于CAN总线的分布式运动控制
一:当今的自动化应用中,智能型技术发展方兴未艾,例如分布式运动控制,其中所有信息与控制均由中央服务器推送至自动化系统的边缘装置,这种设计大量节约了时间与金钱,俨然形成一种趋势。之前分布式控制并不普及人们使用传统的集中式运动控制,由主机(如PLC)管理马达的运动,但是这种控制方式的缺点是需要大量的步线,建置如此复杂的系统相当困难,常出现线缆束过粗不易维修或无法提供可靠服务的情况。 |
相较之下,分布式运动控制系统可减少甚至解决这些问题。由于控制功能就位在驱动器内部或周围,从中心点至各运动轴的布线需求大幅减少,除使布线作业更轻松外,并可有效降低安装成本。而分布式系统可有效串联短程控制以达到较远距离,使整体控制范围扩大,则是另一项额外的效益。 |

二:TRIANMIC是德国一家从事运动控制的研发型公司,致力于步进电机,直流电机,压电陶瓷电机的驱动器,控制器,通讯工具,运动控制芯片的开发,此外还为客户提供专业定做方案。其几乎所有产品都是基于分布式控制理念。现在就介绍基于TRINAMIC产品的嵌入式运动控制方案。整个方案系统图 |
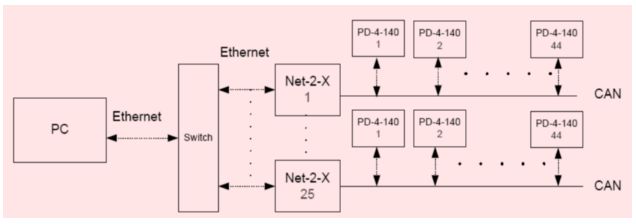
上图为控制1100个步进电机的例子,下图为结构简图。 |

整个网路结构十分清晰,主要有Ethernet转CAN的NET-2-X和PD-140-42-SE-CAN(支持CAN总线的控制+驱动+电机+反馈)现分别介绍PD-140-42和NET-2-X。 |
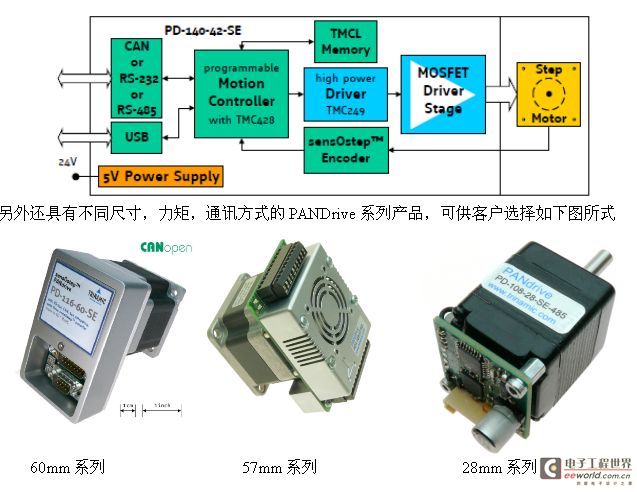
三:PD-140-42-SE-CAN:集成控制+驱动+电机+反馈 |

TRINAMIC产品的一个主要的特点就是集成度非常高,比如其PANdrive系列的产品,举其中一款产品PD-140-42为例。电气参数:

|


CAN总线分布式运动控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)