总线专题:第六讲 PROFINET(上)
,软硬件资源丰富,应用广泛。
2)产品的种类齐全。市场上容易购得。
3)通信速率高。目前已有100~1000M,而且发展潜力大。
4)价格便宜。由于从事的开发商多,产量大,价格自然下降。
5)在企业网中(intranet),如果现场层能采用以太网,那么与企业内部的MES(制造执行系统)和ERP(企业资源管理)层,就容易实现无缝的集成(因为大家都是以太网)。
由于以太网有上述的优势,因此不少厂商正在不遗余力地开发基于实时的工业以太网,目前列入IEC61784-2中的CPF已经有16种之多。
(3)要使以太网具有实时性和时间上的确定性,需要采取哪些措施呢?
1)提高通信速率。在相同通信量的条件下,提高通信速率可以减少通信信号占用传输介质的时间,从这一角度出发,就为减少信号的碰撞冲突,解决以太网通信的非确定性提供了途径。以太网的通信速率已一再提高,从10Mbps,100Mbps到1000Mbps的成功应用,相对于控制网络传统的通信速率的几十kpbs到5Mbps而言,提高通信速率的效果是明显的,对减少碰撞冲突也是有效的。一般在控制领域中采用的是100M。
2)降低网络负荷。
我们知道,令牌总线控制方式在工业控制领域应用的较多,其特点是,网络上各节点对总线的控制权是由令牌(token passing)来控制的。收到令牌的节点在一段规定的时间内拥有网络传输介质的控制访问权,并向网络上发送一帧或多帧信息,当该节点的传输已经完成或占用网络的规定时间已经到时,他就将令牌传递到下一节点。因此,传输过程就是由交替进行的数据传输阶段和令牌传送阶段所组成。由于令牌的传递时间,拥有令牌的节点占用网络控制权的时间是预先规定好的,在网络节点数量一定的情况下,每个网给节点的信息发送的时间是可以预先估计出来的,因此,令牌又称为“确定性”网路。显然,这种确定性比较适合通信确定性和响应实时性要求较高的工业控制系统中应用。其中Arcnet网络就是比较著名的令牌总线之一。
通过比较Arcnet网络与以太网在不同网络负荷下的通信响应性能(如图2)所示。
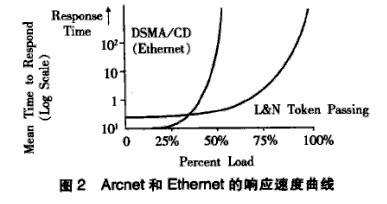
图中横坐标为负载的百分数,纵坐标为响应时间(以对数为刻度)。图中两条曲线,一条为美国Leeds&Northrup公司的令牌网(Arcnet);另一条为CSMA/CD的以太网。可以看出,当网络负荷低于25%,以太网的响应速度要比Arcnet网要快。如果通过仔细设计,对系统中的网络节点数量和通信流量进行控制,使网络负荷低于10%,则完全可以采用以太网来取代Arcnet网等令牌网。当网络负荷低于5%时,网络上碰撞的概率几乎可以为零。
3)采用全双工通信
所谓全双工通信是相对于单工通信和半双工通信而言的。现就这三种通信方式进行说明。图3就可以说明这三种通信线路的工作方式。
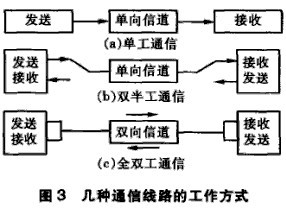
?单工通信
单工通信是指所传送的信息始终朝着一个方向,而不进行与此相反方向的传送,如图3(a)所示。设A为发送终端,B为接收终端,数据只能从A传送至B,而不能由B传送至A。单工通信线路一般采用两线制。
‚半双工通信
半双工通信是指信息流可以在两个方向上传输,但同一时刻只限于一个方向传输,如图3(b)所示。信息可以从A传至B,或从B传至A,所以通信双方均有发送器和接收器。要实现双向通信必须改换信道方向。半双工采用两线制线路,当A站向B站发送信息时,A站将发送器连接在信道上,B站将接收器连接在信道上;而当B站向A站发送信息时,B站则要将接收器从信道上断开,并把发送器接入信道,A站也要相应地将发送器从信道上断开,而把接收器接入信道。这种在一条信道上进行转换,实现A→B与B→A两个方向通信的方式,称为半双工通信。
ƒ全双工通信
全双工通信是指系统能同时进行如图3(c)所示的双向通信。他相当于把两个相反方向的单工通信方式组合在一起。这样就需要4线制。
4)采用交换机(switch)
由于有些搞控制技术的人不熟悉通信技术,因此往往有人将通信方面所使用的switch(交换机)理解或译成为开关或转换开关,或将seitch.technolog(交换技术)理解为切换技术。实际上,通信所用的交换机与控制所用的开关在结构和功能上二者截然不同。二者完全不是一回事。
交换机(switch)在通信网络上相当于一个网桥,因此用若干个交换机可将网络划分为若干网段,以太网交换机由于具有数据存储、转发的功能,使其各端口之间输入和输出的数据帧能够得到缓冲,不再会发生碰撞;同时交换机还可以对网络上传输的数据进行过滤,使每个网段内节点之间数据的传输只限在本机网段内进行,而不需经过主干网,也不占用其它网段的带宽,从而降低了所有网段和主干网的网
总线专题PROFINE 相关文章:
- 总线专题:第六讲 PROFINET(下)(12-16)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)