RS485-CAN 转换器的设计
定义。最终在RS485总线中传输还是以帧为单位,其中包含了地址信息。RS485设备会自动根据接收到的帧,自动判断该帧是否发往本节点,然后做出相应处理。因此,在RS485设备要发送数据时,RS485-CAN总线转换器只需把RS485总线的数据进行帧打包后送入CAN的数据帧中,然后发送到CAN网络上;而RS485设备在接收数据时,RS485-CAN总线转换器则把RS485总线的数据帧从接收到的CAN数据帧中提取出来,发往RS485设备即可。 图4:RS485-CAN 协议模型 3.1CAN 接口软件设计 CAN总线数据链路层结构可分为逻辑链路控制(LLC)子层和媒体访问控制(MAC)子层。LLC子层主要完成帧接收滤波,超载通告和恢复管理,而MAC子层结构功能模块包括发送和接收两个部分。对于CAN总线数据链路层的各种协议已经被集成到SJA1000芯片中,应用时只要对SJA1000芯片的控制寄存器进行相应的初始化即可进行通信,而数据的接收和发送等也是通过读写SJA1000内部寄存器来实现的。这里只给出SJA1000的初始化源程序,其它程序可参考文献[2]进行编写。 SJA1000开始工作之前,首先要判断SJA1000与微处理器的连接是否正确,在确认正确后开始SJA1000的初始化,之后SJA1000进入工作模式,然后才可以进行数据的读写。 typedef struct _CAN_PORTSTRUCT /*SJA1000初始化配置文件结构体*/ { FIL filter; /*滤波方式*/ LIS lisen; /*只听模式/正常模式*/ TES test; /*自测试模式/正常模式*/ SLE sleep; /*睡眠模式设置*/ BAUD baud_rate; /*波特率*/ MODEL workmodel ; /*工作模式*/ UCHAR mask1; UCHAR mask2; UCHAR mask3; UCHAR mask4; UCHAR code1; UCHAR code2; UCHAR code3; UCHAR code4; }CAN_PORT,*CANPORTPTR; STATUS sja1000Init(CANPORTPTR pDev) /*SJA1000初始化*/ { UCHAR value; canBoardInit(); /*进入复位模式*/ canBoard_canOutByte(SJA1000_MOD,MOD_RM); /*确定CAN控制器工作模式*/ value = canBoard_canInByte(SJA1000_CDR); if(pDev->workmodel == Peli) value|= PeliCAN ; else value &= ~PeliCAN; /*设置模式寄存器(只在PeliCAN模式可访问)*/ canBoard_canOutByte(SJA1000_CDR,value|0x48); value = canBoard_canInByte(SJA1000_MOD); if(pDev->sleep == SNORM) value &=~(MOD_SM); /*睡眠模式*/ else value|= MOD_SM; /*正常模式*/ if(pDev->lisen == LNORM) value&= ~(MOD_LOM); /*正常模式*/ else value|= MOD_LOM; /*只听模式*/ if(pDev->test == TNORM) value&= ~(MOD_STM); /*正常模式*/ else value|= MOD_STM; /*自检测模式*/ if(pDev->filter == SINGLE) value|= MOD_AFM; /*单向验收滤波*/ else value &=(~MOD_AFM); /*双向验收滤波*/ canBoard_canOutByte(SJA1000_MOD,value); switch (pDev->baud_rate) { case B20: //波特率为20kpbs canBoard_canOutByte(SJA1000_BTR0,0x07); canBoard_canOutByte(SJA1000_BTR1,0x7F); break; case B80: //波特率为80kpbs canBoard_canOutByte(SJA1000_BTR0,0x01); canBoard_canOutByte(SJA1000_BTR1,0x7F); break; case B250: //波特率为250kpbs canBoard_canOutByte(SJA1000_BTR0,0x00); canBoard_canOutByte(SJA1000_BTR1,0x1C); break; case B500: //波特率为500kpbs canBoard_canOutByte(SJA1000_BTR0,0x00); canBoard_canOutByte(SJA1000_BTR1,0x14); break; default: //默认波特率为20kpbs canBoard_canOutByte(SJA1000_BTR0,0x07); canBoard_canOutByte(SJA1000_BTR1,0x7F); } canBoard_canOutByte(SJA1000_CMR,0); /*设置命令寄存器*/ canBoard_canOutByte(SJA1000_EWLR,0x60); /*设置错误报警限额寄存器*/ canBoard_canOutByte(SJA1000_IER,0); /*不使能所有中断*/ canBoard_canOutByte(SJA1000_OCR,0xaa); /*输出控制寄存器设置*/ canBoard_canOutByte(SJA1000_TXERR,0x0); /*设置发送错误计数器*/ canBoard_canOutByte(SJA1000_RXERR,0x0); /*设置接受错误计数器*/ canBoard_canOutByte(SJA1000_RMC,0); /*设置接收报文计数器*/ canBoard_canOutByte(SJA1000_ACR0,pDev->code1); canBoard_canOutByte(SJA1000_ACR1,pDev->code2); /*设置验收代码寄存器*/ canBoard_canOutByte(SJA1000_ACR2,pDev->code3); canBoard_canOutByte(SJA1000_ACR3,pDev->code4); canBoard_canOutByte(SJA1000_AMR0,pDev->mask4); canBoard_canOutByte(SJA1000_AMR1,pDev->mask4); /*设置验收屏蔽寄存器*/ canBoard_canOutByte(SJA1000_AMR2,pDev->mask4); canBoard_canOutByte(SJA1000_AMR3,pDev->mask4); return OK; } 3.2 RS485接口软件设计 RS4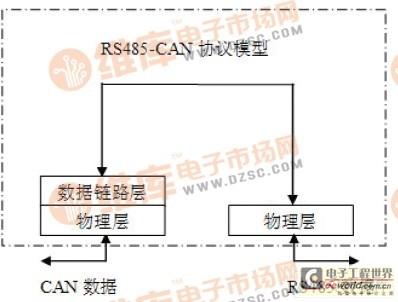
RS485CAN转换 相关文章:
- RS485-CAN转换器的设计(11-21)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)