通用运动控制-最优设备集成方案
贝加莱GMC概念
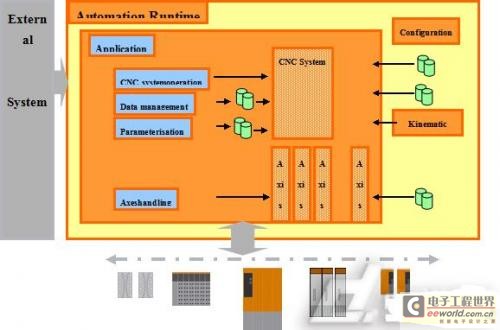
通用运动控制GMC(Generic Motion Control)是由贝加莱提出的适用于各种运动控制的一个概念,在这个GMC的框架下,CNC和机器人将被集成在一个完整的框架下,这得益于B PCC的复杂任务处理能力,面向复杂控制任务的PCC采用分时多任务的实时操作系统Automation Runtime来实现对不同任务的处理,这些任务包括逻辑、液压、显示、CNC和机器人、运动控制、安全技术及通信任务。
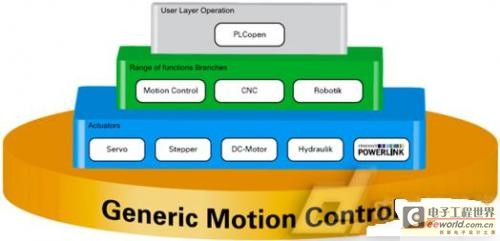
在GMC的架构下,执行机构将不受限制
客户完全可以根据实际应用的需要,根据成本优化的原则选择不同的执行机构作为系统的执行单元,这包括异步电机、步进、直流、同步伺服、扭矩电机等。
CNC
与传统机器人和CNC需要专用系统的不同,B Studio库中支持针对CNC和机器人的开发应用接口,例如通过PLCopen即可执行运动控制、又可运行逻辑、液压等执行机构的控制。
它带来的巨大变革在于:
●无需专用系统的CNC和机器人系统;
●软件上继续保留传统机器人和CNC的操作习惯;
GMC是对传统CNC和机器人技术与PLC控制的融合
之所以会产生专用的CNC系统是因为传统的PLC没有足够的能力来处理CNC和机器人这样对于实时性有极高要求的任务,而PLC的优势又在于其处理逻辑任务,但是,对于复杂的算法设计则又是PC的特长而非PLC的特长,GMC是运行在B PCC控制系统架构之上的,B
因为在某种意义上来说,专用系统的专用性在于软件,而不仅仅是硬件,若硬件能够满足则软件可以运行在各种平台上。
B GMC架构设计
GMC-一个总线、一个系统、一个软件
一个总线
Ethernet POWERLINK是由B
一个系统
CNC
一个软件
B Studio平台是一个适应于所有工业自动化领域应用程序开发的平台软件,它包含有在流程和对象方面的集成能力。
对象
包含了HMI的画面编辑、逻辑程序与算法设计、运动控制、CNC
流程
从项目开始配置、项目协调与管理、仿真、编程、测试、生产中的维护整个产品的生命周期服务能力。
GMC下的机器人系统设计
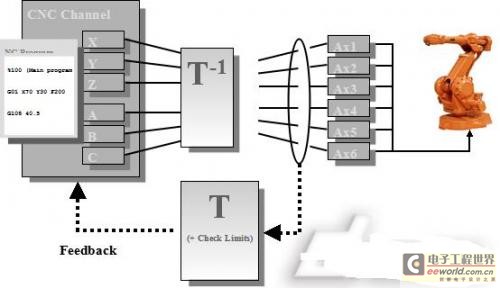
对于不同的机器人,其齐次方程库不同,而B
1.全关节型机器人
2. Tripod
3. SCARA
4.伽利略机器人…
5.…
GMC所支持的机器人库提供了14种不同的机器人类型库的支持能力,基本上能满足各工业领域对于机器人的需要。
B CNC与机器人架构的特点-开放架构,自由设计
对于B
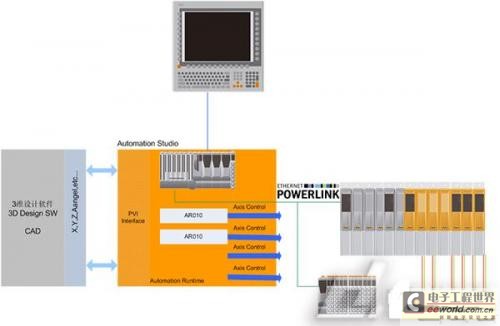
1.可实现从CAD到轴控制的全过程处理,无需复杂的编程
由于可以从CAD软件或三维建模软件中直接获取数据,通过PVI接口可以获得机械工件的参数并输入到Automation Studio中,Automation Studio将其传输给SoftCNC工艺包AR010,然后,由AR010库对整个加工过程进行工艺路径的生成,这包含工艺路径参数、补偿算法、插补功能块的参数输入,而AR010则提供进行轴控制的命令输出,由POWERLINK传输给各个伺服轴,由于ACOPOS智能驱动器可完成本地的位置环计算,则主站仅需要给出位置参数即可,借助于POWERLINK的高速传递能力,主站可以低负载的实现插补计算。
这一设计与传统的差异在于,它可以无需代码编程,而是工艺图形参数直接通过系统导入给CNC系统,CNC系统可采用文本方式或软件块传递方式来进行系统的耦合。
2.自定义解释器和G代码
这个是实现个性化的一个重要因素,与传统的CNC和机器人不同就在于B
SafeRobotics
对于TCP的运动而言,其速度超出范围时将会带来对人身的潜在威胁,B

这是一个独特的设计,在业界领先的技术。
更为个性化的CNC系统
对于那些力求在市场中获得更大竞争力的厂商而言,选择B
贝加莱
1996年8月,贝加莱工业自动化(上海)有限公司正式落户中国上海,本地化的销售与精湛的技术队伍为中国客户带来更迅捷的服务响应。十几年来,贝加莱(中国)一直专注于为国内用户提供高品质的自动化全线产品和优秀的技术解决方案。现在,贝加莱的产品和方案已广泛应用于机械自动化领域,如包装、印刷、塑料、纺织、食品饮料、机床、半导体、制药等行业;以及过程自动化领域,如电力、冶金、市政、交通、石油、化工和水泥等行业。目前,贝加莱产品已通过ISO 9001、UL、TüV、GOST-R等国际认证,产品质量、性能等受到了用户的普遍赞誉,赢得了信誉。如今,贝加莱(中国)已成立了北京、广州、济南、西安、成都和沈阳办事处,上海及各办事处建立了完备的技术培训中心,以及分布在全国的大学联合实验室。
运动控制设备集成GMCCAD轴控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)