高级辅助驾驶系统:驾驶员应知应会
,获得车辆周围环境正确的信息:物体,其速度和加速状态,以及可能的行为等。一个重要而且复杂的问题是,在系统中要进行多少次处理。有可能是将所有的原始数据送入融合引擎—例如,卡尔曼滤波器或者深度学习神经网络,看一看能够得出什么。这种想法有一定的可行性,例如实际上有一类特殊的网络,卷积网络,它用在物体识别时的性能非常好。
但是,设计人员更倾向于采用他们在操作层面上能够理解的系统。在5月份举行的嵌入式视觉大会的一次研讨中,谷歌自动驾驶汽车团队的技术主任 Nathaniel Fairfield 说:“我们的策略是开发简单的系统来处理传感器数据,然后,以更抽象的方式来融合经过预处理的数据。我们更愿意通过一个大滤波器来运行所有一切。”
一种简化的方法是对处理步骤进行逻辑排序 (图1)。每一个传感器都会进行本地信号调理,甚至可能根据下游的反馈来自动适应。然后,每一个传感器会在本地根据其掌握的信息进行物体估算,为推断出的这些物体附加一些属性。
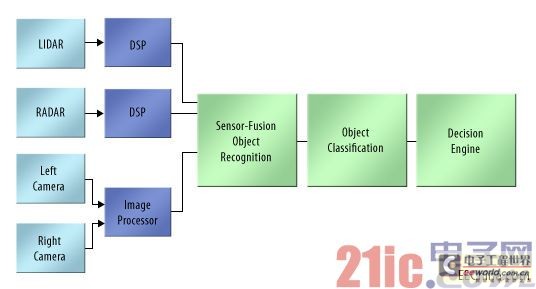
图1. 您可以把ADAS看成是处理器流水线,越来越抽象的看待汽车周围的环境。
例如,激光雷达能够确定地面 030 方向有一个物体,从右向左移动,距离大概 20.24 米。雷达也会报告,在同一位置,地面噪声背景上可能有一个物体。一对高分辨率摄像机会看清楚这一物体—看起来非常像一头金色猎犬,方向在 025 至 035 之间,大概 15 米之外。
这些信息会被传送至融合引擎,接收有物体存在这一主视图,附加上最可靠的属性—例如,位置、速度、大小和颜色。这些信息随后会被送至一个分类引擎,将其标示为一条狗—例如,位置、速度、大小和颜色。这些信息随后会被送至一个分类引擎,将其标示为一条狗
这看起来很有逻辑性,但却不能解决问题。甚至在每一阶段采用哪类算法都没有达成一致。Schumacher 观察到:“目前,大部分步骤都是基于规则的。但是,基于规则的系统需要很多支持。我们会看到一些算法采用了人们不好解释的方法。”
本田北美研究所的首席科学家 Victor Ng-Thow Hing 同意这一观点,“深度神经网络在识别任务上会远远超过人,甚至超过基于规则的算法。有些方面会否定规则。我认为应该有一种混合方法。”
Ayrapetian 说,“不论哪种方法,重要的是认识到能不能解决问题。目前,自动驾驶汽车还不能 100% 的一直保持在车道上行驶。在新环境下,神经网络也不能很好的工作。甚至谷歌汽车也依靠非常详细的地图来识别物体,定位自己。我们还没有达到非常智能的程度来完全理解传感器数据。”
策略分类
对于所有的难题,分类引擎还远远不够。对物体分类如果能够成功的话,会产生物体列表,标识上距离和速度等实际属性,根据其可能的身份进行分类,例如,人、绿化灌木,或者建筑符号等。在分类过程中,也应该针对其在 ADAS 判决过程中的重要性而标上属性:非常危险、导航线索,或者无关的背景等。还应该对分类的不确定性等级进行评价。分类功能应使用各种不同的滤波器、神经网络以及基于规则的分类树,通过融合不同传感器的数据得出自己的结论。
现在,问题的本质发生了很大变化。至少在一些较好的条件下,ADAS 系统非常详细的知道其位置和环境。现在,它必须决定下一步做什么,特别是出现不确定性因素时。就目前而言,这意味着基于规则的系统。
Ayrapetian 解释说:“您可以使用神经网络来识别物体,甚至是把汽车放在周围环境中。但是,您需要规则来得出判断,并解释。”
使用基于规则的系统来决定 ADAS 响应的基本原因可能在于我们对神经网络工作方式的感情因素。可以训练深度学习网络,使其能够比人更正确的理解环境—也就是,99% 的时间都能够正确理解被测试的视频。但是,即使对金色猎犬有 1% 的误解人们也不会满意:我们要的是非常可靠的规则,决不能撞上一条小狗。
更深层次的问题在于系统验证和控制兼容问题。很多工程师都强烈的感受到,在相信一款设计之前,必须能够理解设计是怎样工作的—实际上,在规划验证策略之前。而且,符合某些规则要求设计中的每一组成都是可追溯的,回溯到最初的需求来源。所有这些需求对于神经网络而言都是切实的问题,人很难完全理解网络中某一阶段在干什么,也不能追溯回系统需求文档的某些章节。
相反,基于规则的系统一般非常直观:您可以读取一条规则,知道为什么在此处要采用它。但是,基于规则的系统实行起来也有局限。很难设计一个能够在不可预见的环境中正常工作的系统—务要求很好的进行抽象思维,找到胜任于某些环境的规则。随着规则的增多,计算要求和行为预测都会带来问
辅助驾驶DAS驾驶 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)