基于PROFIBUSDP的变频器网络控制
口定义:控制器自身状态(可实现控制功能否);以太网运行正常;PROFIBUS—DP运行正常等输出监视。
3.2 主站与变频器数据交换
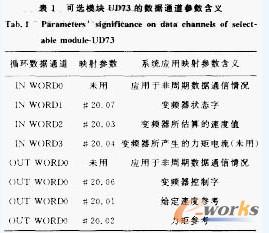
变频器可选模块UD73提供用于实现网络控制的数据通道,表1对于它们的数据通道及映射参数含义进行了描述。通过设定UD73模块中的参数#20。05(设置变频器的PROFIBUS-DP地址参数)为组态中所分配的地址,实现与主站连接。

由于应用MOVE指令来访问I/O或过程镜像输入输出表时仅能一次读出不多于4个字节的连续数据 ,为保证通信数据的连续性(这种连续性实现数据作为一个整体连续发送而不被中断,以防止由于中断而带来控制上的可能严重后果),通常主站与从站进行数据交换过程中以连续的8个字节进行其间的数据交换。这样就需要应用SFC14(DPRD—DAT)和SFC15(DPWR—DAT)来完成,下面为实际应用程序中应用这两个系统功能的实例。
//...
CALL "DPRD— DAT" //主站读取变频器8个字节(4个字)
LADDR :=W 11O //从变频器读取数据的输入区域所组态的起始地址;
RET_VAL:=MW20 //如果在函数运行过程中发生错误,返回故障代码;
RECORD :=P#M 30。0 BYTE 8 //所读取的用户数据的目的区域。要与在STEP 7中所选择的模块组态的数据长度相同。仅容许BYTE数据类型
//...
CALL "DPWR_DAT" //主站发送8个字节给变频器(4个字)
LADDR :=W #16#1OO //要被写入数据的模块的输出地址中所组态的起始地址;
RECORD :=P#M 6O。O BYTE 8 //与”DPRD_DAT”对应的参数含义相同,不过RET_VAL:=MW22 //在这里RECORD声明为“INPUT”;
//...
在表中看到,循环数据通道中IN Word3未用,如果在变频器参数#2O.04映射为=1,这样读入的数据是没意义的,应予以屏蔽。
3.3 主站与远程I/O数据交换
PROFIBUS-DP网络是将一般的“分散型外围设备”看成主站所处的中央插槽中的I/O模块。但实际位于中央插槽的I/O模块与远程I/O在STEP 7软件系统中的数据类型是不同的,不过对于其访问方法是一致的,即都可以应用STEP 7中的MOVE指令完成数据交换的。实际应用程序中读取远程I/O实例:
//...
L "ET200M_IN" //远程I/O输入符号变量对应PIW0,在变量表中定义
T MW 140 //通过MOVE将远程I/O输入装在至内部中间继电器Mw14O;
//...
3.4 系统监控功能的实现
STEP 7提供了大量的系统监控功能组织块。针对本系统应用情况,采用了诸如OB86(分布式I/O系统中子网,机架或站出现故障),OB87(通信故障),OB122(I/O访问错误),OBI21(程序错误)等组织块[6]。由于这些组织块中的局部变量提供了所有其所处理故障的错误类型、代码,中断优先级及中断调用时间等信息。那么在应用中,采用了为每类故障定义的数据结构块(DB)来记录这些故障信息,比如故障类型,代码和故障时间等,在主应用程序中以一定的时间周期扫描这些DB,以完成整个系统运行的监控。同时,正是调用了这些组织块使得系统在某些故障下仍可保证系统控制程序的运行,从而保证了整个系统的安全与稳定。
4 基于PROFIBUS—DP的变频器控制在模拟控制系统的应用
4.1 算法描述
长定子换流技术描述了相关定子绕组基于当前列车运行状态在时间上逻辑顺序操作的方法,其过程可作为多电机在时间上的协调控制问题。对于长定子绕组换流技术的研究,可通过多电机协调控制系统来模拟。不同的运行情况,要求不同的牵引力,从而导致不同的换流方法。其对应的相关联的定子绕组数量、控制设备数量及控制复杂度等都将不同。现有的换流方法主要有:两步法(列车站内牵引);三步法(列车高速运行牵引)等。以两步法为对象,将模拟磁悬浮列车一侧相邻两个长定子绕组的控制方法。
两步法过程如下:当列车处于当前定子段某位置时,开始降低此定子段电流(必须保证列车进入下一定子段时电流为零)。当电流为零时,切断开关,断开此定子段与电源电气连接,并将下一定子段与电源连接,完成切换。整个过程中保证推力损失为最小。
4.2 控制初步实现
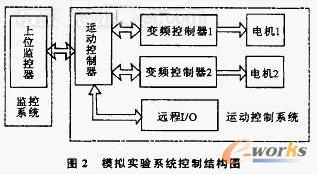
通过对基于PROFIBUS—DP的多电机控制系统的分析,采用了所形成的网络层次结构来模拟磁悬浮列车的换流过程,其控制结构如图2。将两台电机作为两步法中的相邻定子段,它们的速度和作为转换过程中推力变化的一种数量描述。

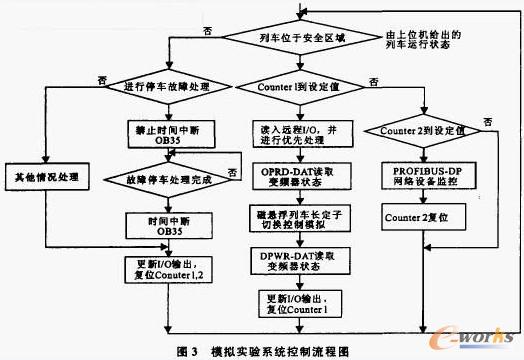
以时间中断组织块OB35(时间基准为100 ms)作为控制软件周期查询和更新状态的时间基准。设计计数器Counter1作为主站从远程I/O取得控制状态信息和向变频器输出控制的时间周期,计数器Counter2作为非更新期间的网络中各设备状态监视的时间周期。设计基于PROFIBUS—DP的网络控制流程图如图3。
5
PROFIBUSDP变频器网络控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)