智能机器人保姆
能射频芯片。创新的采用高效的循环交织纠检错编码,抗干扰和灵敏度都大大提高,最大可以纠24bits连续突发错误,达到业内的领先水平。视频通信采用2.4GHz 无线音视频模块,2.4GHz和433MHz一样是一个公共频道,主要是开放给工业,科学、医学三个主要机构使用,不需授权即可使用,2.4GHz技术空中通信速率快,可达到2M/S,能满足视频传输对传输速率的要求,在本设计中,摄像头采用普通的CCD倒车雷达摄像头,水平成像角度为150度,摄像头输出的是标准的AV制式的信号,该信号直接连入视频发射模块,整个部分没有和单片机相连接,这样即使单片机在使用过程中出现问题,系统也能继续传输图像。
该部分都是采用现成模块而设计的,这样使用方便,而且稳定可靠。在软件设计上只需要对数据通信部分进行简单操作即可完成。
2.3 智能机器人设计
智能机器人的硬件主要设计部分在于机械手臂与摄像头的设计,其软件设计主要是遥控器部分、摄像头部分等的设计,下面主要来介绍着这几部分的设计。
2.3.1 机械手设计
1)机械手硬件设计
机械手是本设计的关键部分,机械手要完成一个抓取动作,需要有多个关节和一个可控制的夹持器,在机械手的关节设计上,模仿了人的手臂的工作方式,机械手有三个关节分别对应肩关节、肘关节、腕关节,其中肩关节使用一个金属齿轮舵机和一个塑料舵机分别控制机械手的两个自由度,肘关节使用一个金属齿轮舵机控制一个自由度,腕关节使用两个塑料舵机控制一个自由度和一个夹持动作。这五个舵机能在信号的作用下,同时协同工作,完成爪持的动作。所有关节与水平面成垂直关系时,安装时定义为舵机的零角度附近,这样每一个关节都能执行±90°的运动,关节的运动关系和对应关系如图7所示。

图7 机械手设计示意图
2)机械手的控制部分设计
本设计采用的是舵机来控制,舵机的工作原理是控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位器是相连的,舵盘转动的同时,带动位置反馈电位器,电位器将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标角度后停止,这样,实现了舵机角度的闭环控制。舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,舵机的第三根线是信号线,本设计中用到的舵机控线为白色或者黄色,舵机的控制信号时基脉冲周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms到2.5ms,相对应舵盘的位置为0-180度,呈线性变化,其对应关系如图8所示。
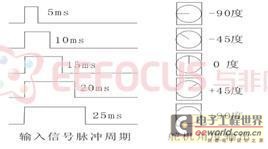
图8 舵机输出角度与脉冲周期关系图
3)机械手电路设计
采用的是当机械手舵机在工作时,需要5V供电电压,同时工作的电流大概是2~3A,在
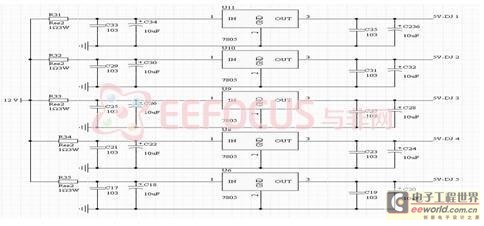
图9 机械手电路设计
本设计中,使用的电池是12V的硫酸铅蓄电池,为了满足供电的需要,设计中采用5个KIA7805芯片将12V的电压转换为5V的电压,分别为5个舵机供电。电路原理图如图9。
2.3.2 视频设计
视频采用的是已经集成的模块,其接线图如下图10所示:
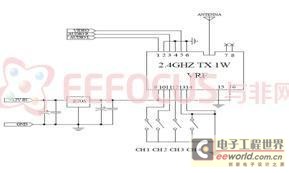
图10 视频接线图
设计中为了能够提供很好的视频效果,还专门设计了照明灯。其设计电路图如图11所示:
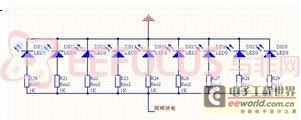
图11 照明电路图
同样,为了使用者很好的视觉效果,摄像头部分设计了移动云台。摄像头云台的作用是通过遥控,控制云台的两个电机的转动,带动摄像头运动,从而使得操作者能更好的观察平台端周围的环境,获得更多的信息,也能在一定程度上消除视觉死角,对机械手的运动操作更加方便。云台的硬件如图12所示,两个小型直流减速电机成90度安装,电机1的正反转带动摄像头左右转动,使摄像头获得可调的水平视角,电机2的正反转带动摄像头的俯仰角度发生变化,使摄像头获得可调的俯仰视角,电机的控制和手臂驱动电机的控制方法和电路是一样的。
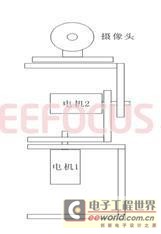
图12 云台设计示意图
2.3.3 智能机器人软件设计
本设计采用结构化和模块化的编程思想,二者相辅相成实现各模块间的连接,各个模块之间程序保持独立,模块之间通过入口参数和出口参数联系,这样有利于程序的调试与修改。
遥控端主程序设计

遥控端的主程序的任务是采集当前操作者的操作指令,对数据处理并发送给小车端,主程序完成遥控系统的初始化,AD转换器初始化,串行数据端口初始化,IO口初始化,终端服务程序初始化,遥控端主程序流程图如图13所示。
串型数据传输程序
在遥控端,数据完成采集之后,需要无线发送给平台端,作为控制信号来遥控平台端的各个执行机构完成操纵者的指令,单片机自带两个
TL072APC220智能机器人肌电信号识 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)