基于加速度传感器的油井示功图位移测量技术研究
上,提出了一种改进的复合滤波方法。 形态滤波法 形态滤波[6]是一种非线性数字滤波技术,主要应用在人脸识别领域。根据加速度信号的特点,形态滤波可以有效地抑制加速度信号的噪声,较好的保持加速度信号的几何特征[5]。本文采用了腐蚀与扩散相结合的方式来达到形态滤波的效果,核心算法定义为: Y={[(fΘg)⊕g](n)+[(f⊕g)Θg](n)}/2 其中,[(fΘg)⊕g](n)表示形态开运算,[(f⊕g)Θg](n)表示形态闭运算,g表示结构元素,本文选用{0,7.0711,10,7.0711,0}。 通过抽油现场测试,游梁式抽油机的位移和冲程测量效果理想,加速度信号波形如图3所示。 然而,该结构元素g只针对游梁式抽油机设计,对皮带式抽油机没有兼容性,现场测试结果误差很大。由于形态滤波的性能与结构元素有密切关系,当信号的先验波形无法确定时,理论上应采用自适应方法对结构元素尺寸最优估计。显然,利用MSP430单片机进行自适应算法是不切合实际的。 改进的滑动滤波法 传统的滑动平滑滤波只采样一次,将这一次采样值与过去若干次采样值一起求平均,若取N个采样值求平均,RAM中必须开辟N个数据的暂存区。 由于冲次(1分钟内抽油机上下往返的次数)通过判断加速度的两个最高点的计算得出(两个最高点之间的点数乘以采样周期50ms得到抽油机运行周期,冲次=60/周期)。使用传统的滑动滤波方法最高点的误判率高,难以得出准确的周期。本文采用了一种改进的滑动滤波方法,很好的解决了以上问题。 选用MSP430F1611(10K RAM)定义1800大小浮点数数组用来存储90s的加速度原始信号。经过3次滑动平滑滤波,公式如下: 3点滑动块:XK=(XK-1+XK+XK+1)/3 (1≤K≤N-1) 7点滑动块:XK+(XK-3+XK-2+XK-1+XK+XK+1+XK+2+XK+3)/7 (3≤K≤N-3) 式中:XK表示第K次采集的加速度数据;N表示采集数据个数;K表示当前加速度信号的序号。 经过3点滑动块或7点滑动块处理90s采集的所有加速度信号后找到最大值MAX,然后在MAX前后找出相近的最大值MAX1和MAX2(MAX-MAX10.01V,MAX -MAX20.01V),在50ms采样间隔下算出周期和冲次: 式中:T表示抽油机上下周期;nMAX1表示MAX1点的采集序号;nMAX2表示MAX2点的采集序号。 本文对比3点滑动块和7点滑动块的波形,并对计算出的位移和冲程进行比较,发现7点滑动块更能反映真实的加速度信号,同一口井的冲程测量重复性好,如图4所示。 加速度双重积分算法 示功图测试仪利用加速度信号间接得到位移和冲程信息。得到加速度的测量值后,要计算抽油杆运动的相对位移还必须解决两个问题:加速度的零点校正和积分求速度时边界条件的确定。因只需得到抽油杆运动的相对位移,由速度积分求位移时,可将边界条件置为零。 经过理论上的综合推导,由加速度求位移或冲程的算法可简要表述为: (1)将一个周期内加速度的测量值减去其平均值,令边界条件为零,对修正后的加速度积分(在MSP430中采用数值积分)得到速度; (2)将所求的速度减去其平均值,令边界条件为零,对修正后的速度积分(在MSP430中采用数值积分),即得到相对位移或冲程。 现场试验数据分析 加速度传感器ADXL203在电路板上实际放置位置的偏差可以直接影响其输出信号的大小,本设计将ADXL203水平放置在电路板上。为验证ADXL203放置位置是否准确,分别在水平和垂直两种方式下测试了5次。测试结果表明,无论水平放置还是垂直放置,X,Y两轴的误差均小于0.5%。由此表明,在设计、焊接和安装过程中,ADXL203的位置非常准确,达到了去除边界双积分算法的具体精度要求。 针对游梁式抽油机和皮带式抽油机两种不同类型的抽油机井型,先后进行了多次现场测量和数据分析,以冲程测量为例的数据与分析如表1所示。游梁式抽油机属于旋转运动转化为抽油杆上下运动,往复一次的运动规律接近正弦波变化,且冲程较短;皮带式抽油机直接驱动抽油杆上下运动,运动规律接近矩形波变化,且冲程较长。 结语 现场试验结果表明,本文研究的位移或冲程测量技术适用于冲程从2.1m~5m,冲次从0.8冲~5冲的不同抽油机井型,而且具有较高的测量精度;但是,对于冲次<0.8冲的稠油井抽油机,测量误差偏大。 参考文献: [1] 孙新铭,黄卫,曹利. 示功图在油田生产中的应用[J].内江科技,2007(8):125-142 [2] 容太平,沈承虎. 用加速度传感器测量位移的原理与误差分析[J].华中理工大学学报,2000,28(5):58-60 [3] ADXL203 Precision ±1.7g Dual-Axis iMEMS Accelerometer[EB/OL]. http://www.analog.com [4] 张建成,吴新杰.形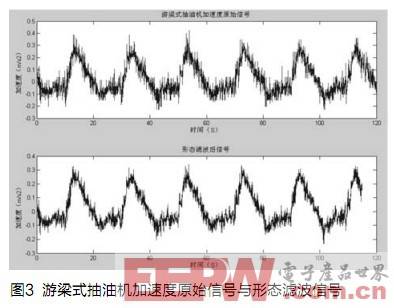



示功图 加速度传感器 电路设计 位移 ADXL203 MSP430 200909 相关文章:
- 基于传感器的角度测量系统设计(02-06)
- 测定加速度传感器的电压灵敏度的方法(01-06)
- 加速度传感器在人为安全方面的作用(12-29)
- 加速度传感器在汽车电子的方向(12-29)
- 振动传感器加速度传感器干扰分类(12-29)
- 加速度传感器不同的安装形式(12-29)