LabVIEW NI SoftMotion和C系列驱动接口入门

图5. NI 9512模块的轴配置对话框
完成下述步骤,对轴进行配置:
1. 右击项目浏览器窗口中的轴,并从快捷菜单中选择属性,打开轴配置对话框。
2. 在Axis Setup页面中,确认将循环模式设置为开环。配置为开环模式的轴会生成步进式输出,但无需电动机的反馈信息来确认位置。
3. 同样在Axis Setup页面中,确认Axis Enabled和Enable Drive on Transition to Active Mode复选框包含有复选标志。这样配置后,在运行VI的时候将自动激活轴。
要避免自动激活轴,需禁用这些选项。
4. 如果模块中并不包含有物理信号连接,那么为了保证系统正常运行,必须禁用这些输入信号。要禁用限制信号和引导信号(home翻译为引导合适吗?),转至Motion I/O页面,在Forward Limit、Reverse Limit和Home部分中,从Enable复选框中删除这些复选标志。
5. 根据系统需求,配置所有额外I/O。
6. 单击OK关闭轴配置对话框。
7. 重复步骤1到步骤6,配置轴2。
注意:请确保在部署项目之前,已经连接好所有的硬件,并接通了电源。项目的部署将NI 扫描引擎切换为Active(活动)模式,并使轴和驱动有效(如果已经连接好轴和驱动的话),这样你就可以立即启动运动。参考LabVIEW Help中的《在RT目标上部署并运行VI》一章节,了解更多关于配置和问题解决技巧方面的知识。
8. 右击项目浏览器窗口中的控制器项目,并从快捷菜单中选择部署全部,将轴、坐标和轴设置部署成实时目标。
使用交互式测试面板测试系统
使用Interactive Test Panel(交互式测试面板)来测试并调试您的运动系统和所选轴上的配置设置。借助于交互式测试面板,你可以执行简单的直线运动、监测运动和I/O状态信息、改变运动限制、获取系统中的错误和故障信息并查看运动的位移或者速度曲线。如果系统中连接有一个反馈设备的话,你还可以获取反馈的位置以及位置错误信息。
在配置好轴后,完成以下步骤,采用轴配置对话框测试所做设置。
1. 右击项目浏览器窗口中的轴,并从快捷菜单中选择交互测试面板。
2. 使用选项卡设置期望位置、运动模式和运动限制。参考LabVIEW帮助中的NI SoftMotion模块部分,详细了解该对话框中的条目。
3. 在对话框的底部单击开始按钮,根据配置好的选项启动运动。
4. 使用状态和曲线选项卡,在运动进行中监测其状态。
以扫描接口模式创建一个VI
在本部分中,借助于增添到工程中的模块的运动I/O资源,创建一个VI。参考LabVIEW帮助中的Real-Time Module(实时模块)一节,获得关于扫描接口模式和NI Scan Engine(NI扫描引擎)的详细信息。
配置定时循环
将定时循环同步到NI扫描引擎,可以使得时间敏感型的运动函数模块能够以指定的扫描速度运行。定时循环内部的任何代码都保证了每个扫描周期只执行一次。必须最小化定时循环中的内存分配,以避免在系统中引入不确定的时间延迟。
如果你的代码不需要按照扫描速率运行,那么你可以使用带有等待下一毫秒整数倍功能的while循环来控制循环速率。
完成以下步骤,配置定时循环:
1. 在项目浏览器窗口中右击控制器项目,并从快捷菜单中选择新建»VI,打开一个空白VI。
2. 在VI的程序框图中放置一个定时循环。
3. 双击定时循环的输入节点,打开配置定时循环对话框。
4. 在循环定时源中,将源类型设为同步至扫描引擎。你可以单击帮助按钮,获得关于如何同步至NI扫描引擎的信息。
5. 在循环定时参数中,将周期设为5个扫描周期。该步骤可选,但是可以允许定时循环以一个较低的速率同步至NI扫描 引擎。配置定时循环对话框应该与图7中类似。
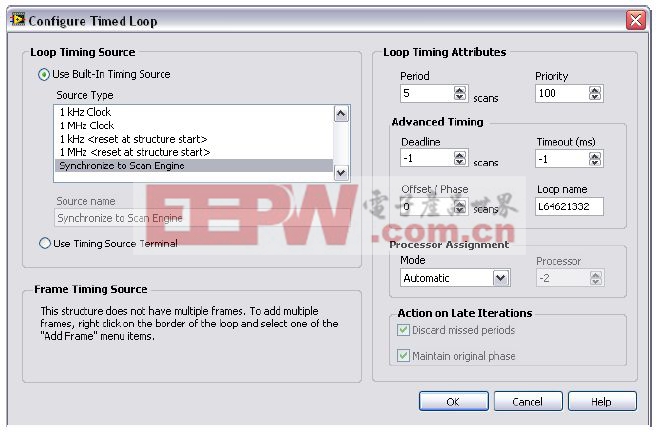
图7. 配置定时循环
6. 单击OK。
创建运动配置文件
本示例采用NI SoftMotion Line and Read function blocks(线和读功能块)来创建一个简单的运动配置文件,并监测运动位置信息。
完成以下步骤,设置运动:
1. 在定时循环内部放置一个Line功能块。
2. 右击execute(执行)控件,并从快捷菜单中选择创建»输入控件,在前端面板中为该输入增加控件。
3. 重复步骤2,在前端面板中,分别为position(位置)、velocity(速度)、acceleration(加速度)和acceleration jerk(加加速度)这几个输入增加控件。
4. 将deceleration(减速度)输入连线至acceleration(加速度)输入,将deceleration jerk(减减速度)输入连接至acceleration jerk(加加速度)输入。在有些应用中,减速度值可能必须与加速度值不同,但本应用中二者相同。
5. 从LabVIEW 项目中将坐标空间1资源拖至定时循环外部的方框图中,并将其连线至功能块上的资源输入。
6. 在定时循环内部放置另一个Line功能块。
7. 将Line功能块的错误接线端和资源接线端
SoftMotion LabVIEW NI 驱动 相关文章:
- 利用LabVIEW NI SoftMotion模块和SolidWorks改进设(12-23)
- 基于LabVIEW RT的自定义流程测控系统(10-30)
- 基于LabVIEW的语音分析平台的实现(10-30)
- 基于示波器卡和LabVIEW的马达编码器测试系统(11-06)
- 基于虚拟仪器的网络虚拟实验室构建(11-06)
- 运用LabView控制DS3900串口通信模块(02-02)