具有自适应测量功能的空气粉尘测量仪设计
时间:03-12
来源:互联网
点击:
0引言
粉尘即空气中的悬浮颗粒物,其大小在0.01~20 μm范围内。环境保护部门将空气动力学当量直径大于10 μm的悬浮颗粒称为可见粉尘,它们在静止空气中会快速沉降;空气动力学当量直径小于等于10 μm的悬浮颗粒称为可吸入颗粒物;空气动力学当量直径小于等于7.07 μm的颗粒物称为呼吸性颗粒。
随着国民经济的快速发展,粉尘污染越来越严重。目前我国大气呈煤烟型污染,许多城市空气中的总悬浮颗粒物(TSP)长期居高不下,与世界卫生组织所给的空气质量标准相差甚远。粉尘对人类危害极大,尤其是小粒径颗粒物,因为小粒径颗粒物能长时间飘浮在大气中,难以沉降到地面,易进入人体呼吸道,且粒径越小,在人体呼吸道中的沉降位置越深,危害就越大。因此粉尘浓度的测量在环境保护领域中具有十分重要的意义,是迫切需要解决的问题。
测量粉尘浓度的方法各式各样,大致有两种类型:基于取样的方法进行测量(如滤膜称重法)和基于非取样的方法进行测量(如光散射法)。近年来国内外均采用光散射原理进行粉尘浓度测量,该测量方法可以实时在线测量,直接获取测量结果,并可以实现数据存储、数据输出、自动测量、通信等功能;体积小、重量轻、操作简便、稳定性高、可靠性高也是该类仪器的明显优点。
1光学粉尘测量仪的工作原理与硬件组成
理论和实验研究表明,在粉尘性质一定的条件下,粉尘的散射光强度与其质量浓度成某种比例关系。粉尘浓度测量仪正是依据这一理论进行设计,它以悬浮颗粒物(粉尘)在光束中产生的光散射现象为原理,直接准确测量空气中悬浮颗粒物的相对质量浓度。根据光散射原理,当尘埃颗粒的半径r小于光的波长λ时满足式(1):

式中:V=(4/3)πr3;N为单位体积内的粒子数;ε为空气中的介电常数;ε0为真空中的介电常数;θ为散射角;R为光敏感区到光电转换器的距离;r为粒子的半径;I0为人射光强;λ为光源的波长;H为与测量系统几何尺寸有关的一个常数。
显然,在某一测量系统中λ,ε,ε0,θ,R,I0可以认为是常数,由于进行质量浓度测量时,尘埃颗粒是数颗一起通过光敏感区,因此在入射光强保持不变的情况下,散射光强Iθ与V,N相关。
光学粉尘测量仪主要由光学传感器、信号调理单元、模数转换单元、微机控制、通信接口、气路系统、电源系统等组成。其总体硬件结构如图1所示。
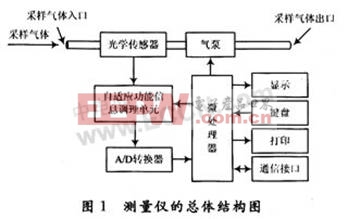
粉尘浓度测量的工作过程如下:
(1)测量开始由气泵将被测空气抽人光学传感器。光学传感器由照明系统、散射光收集系统组成,这两个系统的轴线与采样气流的轴线相互垂直,交点周围的一个小区域是测量系统的光敏感区,它是粉尘流过时得到照明并产生散射光的位置。半导体激光器发出的光波穿过具有粉尘的被测区域后,光电二极管将散射光信号转换成电信号。
(2)光电转换后的信号极其微弱,因此需通过信号调理电路对获得的信号进行处理和放大,以满足A/D转换接口的需要。
(3)信号经A/D转换器转换后,送微处理器。
(4)微处理器对采集到的数据实时进行计算,并自动生成当前粉尘浓度值,同时将数据进行存储、显示,根据需要对测量结果进行打印或将数据传送至PC机。
2自适应测量功能
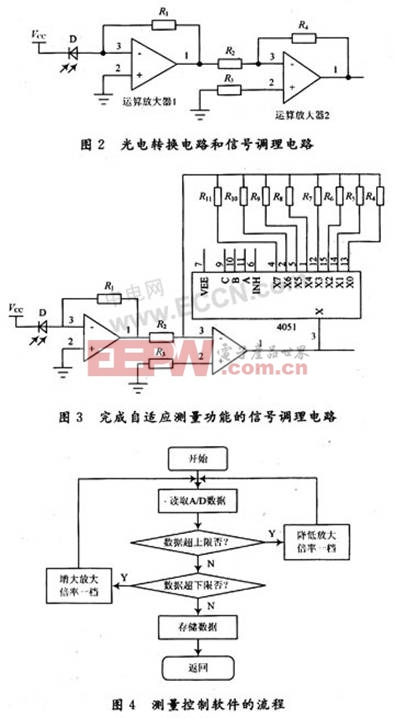
粉尘测量仪的光电转换电路和信号调理电路如图2所示,其中运算放大器1为前置放大,功能是完成I/V转换,并将信号放大。运算放大器2完成信号调理和放大。由于粉尘测量仪的测量范围很宽,一般为0.01~20 mg/m3,在这样宽范围内保持测量数据的线性和准确,使用常规的放大电路是较为困难的。这是因为要保证在极低浓度时测量准确,必然要将放大器设计成很高的增益,然而当粉尘浓度达到3 mg/m3时,放大器几乎达到饱和,因此按常规设计方案不能满足0.01~20 mg/m3的测量范围。为此,设计了一个硬件和软件相结合,能完成自适应测量功能的信号调理电路,如图3所示。
图3电路是一个8选1程控放大器,放大器的放大倍率通过程序控制可分为1,2,4,5,10,20,30,50,自适应测量功能的实现如下:当仪器进入测量微处理器发出控制命令,使程控放大器处于放大倍率50状态,读取数据后判断程控放大器是否处于最佳的工作状态,若发现溢出或不在最佳的工作状态,则改变程控放大器的放大倍率,使其进入最佳的工作状态,为了使测量数据统一,可以通过软件进行修正。测量控制软件的流程如图4所示。
3实测数据与分析
测试采用了粉尘发雾装置产生粉尘与空气的混合气体,用同一根管道分别送入具有自适应测量功能和常规的放大电路的两种仪器进行测量,每种仪器各用2台,分A组和B组。图5(a)和(b)是A组和B组测试数据的对比曲线。
由于实验测得的是一些离散的数据点,为了更好地分析数据,找出其内在的规律性,利用这些离散的数据点,运用最小二乘法进行曲线的拟合并绘制出曲线拟合图,这些用Matlab实现。生成的曲线拟合图如图6所示。

4结语
测试结果表明,采用常规放大电路的仪器在粉尘浓度为3 mg/m3时就进入饱和状态,无法测量粉尘浓度大于3 mg/m3的数据。而采用具有自适应测量功能的仪器在粉尘浓度为10 mg/m3时还具有较好的线性,证明该方法有效地扩大了测量范围,特别是在测量高浓度粉尘的情况下,明显提高了测量的准确性和测试精度,通过对空气的实际测量,具有自适应测量功能的仪器达到了0.01~20 mg/m3的测量范围。
粉尘即空气中的悬浮颗粒物,其大小在0.01~20 μm范围内。环境保护部门将空气动力学当量直径大于10 μm的悬浮颗粒称为可见粉尘,它们在静止空气中会快速沉降;空气动力学当量直径小于等于10 μm的悬浮颗粒称为可吸入颗粒物;空气动力学当量直径小于等于7.07 μm的颗粒物称为呼吸性颗粒。
随着国民经济的快速发展,粉尘污染越来越严重。目前我国大气呈煤烟型污染,许多城市空气中的总悬浮颗粒物(TSP)长期居高不下,与世界卫生组织所给的空气质量标准相差甚远。粉尘对人类危害极大,尤其是小粒径颗粒物,因为小粒径颗粒物能长时间飘浮在大气中,难以沉降到地面,易进入人体呼吸道,且粒径越小,在人体呼吸道中的沉降位置越深,危害就越大。因此粉尘浓度的测量在环境保护领域中具有十分重要的意义,是迫切需要解决的问题。
测量粉尘浓度的方法各式各样,大致有两种类型:基于取样的方法进行测量(如滤膜称重法)和基于非取样的方法进行测量(如光散射法)。近年来国内外均采用光散射原理进行粉尘浓度测量,该测量方法可以实时在线测量,直接获取测量结果,并可以实现数据存储、数据输出、自动测量、通信等功能;体积小、重量轻、操作简便、稳定性高、可靠性高也是该类仪器的明显优点。
1光学粉尘测量仪的工作原理与硬件组成
理论和实验研究表明,在粉尘性质一定的条件下,粉尘的散射光强度与其质量浓度成某种比例关系。粉尘浓度测量仪正是依据这一理论进行设计,它以悬浮颗粒物(粉尘)在光束中产生的光散射现象为原理,直接准确测量空气中悬浮颗粒物的相对质量浓度。根据光散射原理,当尘埃颗粒的半径r小于光的波长λ时满足式(1):
式中:V=(4/3)πr3;N为单位体积内的粒子数;ε为空气中的介电常数;ε0为真空中的介电常数;θ为散射角;R为光敏感区到光电转换器的距离;r为粒子的半径;I0为人射光强;λ为光源的波长;H为与测量系统几何尺寸有关的一个常数。
显然,在某一测量系统中λ,ε,ε0,θ,R,I0可以认为是常数,由于进行质量浓度测量时,尘埃颗粒是数颗一起通过光敏感区,因此在入射光强保持不变的情况下,散射光强Iθ与V,N相关。
光学粉尘测量仪主要由光学传感器、信号调理单元、模数转换单元、微机控制、通信接口、气路系统、电源系统等组成。其总体硬件结构如图1所示。
粉尘浓度测量的工作过程如下:
(1)测量开始由气泵将被测空气抽人光学传感器。光学传感器由照明系统、散射光收集系统组成,这两个系统的轴线与采样气流的轴线相互垂直,交点周围的一个小区域是测量系统的光敏感区,它是粉尘流过时得到照明并产生散射光的位置。半导体激光器发出的光波穿过具有粉尘的被测区域后,光电二极管将散射光信号转换成电信号。
(2)光电转换后的信号极其微弱,因此需通过信号调理电路对获得的信号进行处理和放大,以满足A/D转换接口的需要。
(3)信号经A/D转换器转换后,送微处理器。
(4)微处理器对采集到的数据实时进行计算,并自动生成当前粉尘浓度值,同时将数据进行存储、显示,根据需要对测量结果进行打印或将数据传送至PC机。
2自适应测量功能
粉尘测量仪的光电转换电路和信号调理电路如图2所示,其中运算放大器1为前置放大,功能是完成I/V转换,并将信号放大。运算放大器2完成信号调理和放大。由于粉尘测量仪的测量范围很宽,一般为0.01~20 mg/m3,在这样宽范围内保持测量数据的线性和准确,使用常规的放大电路是较为困难的。这是因为要保证在极低浓度时测量准确,必然要将放大器设计成很高的增益,然而当粉尘浓度达到3 mg/m3时,放大器几乎达到饱和,因此按常规设计方案不能满足0.01~20 mg/m3的测量范围。为此,设计了一个硬件和软件相结合,能完成自适应测量功能的信号调理电路,如图3所示。
图3电路是一个8选1程控放大器,放大器的放大倍率通过程序控制可分为1,2,4,5,10,20,30,50,自适应测量功能的实现如下:当仪器进入测量微处理器发出控制命令,使程控放大器处于放大倍率50状态,读取数据后判断程控放大器是否处于最佳的工作状态,若发现溢出或不在最佳的工作状态,则改变程控放大器的放大倍率,使其进入最佳的工作状态,为了使测量数据统一,可以通过软件进行修正。测量控制软件的流程如图4所示。
3实测数据与分析
测试采用了粉尘发雾装置产生粉尘与空气的混合气体,用同一根管道分别送入具有自适应测量功能和常规的放大电路的两种仪器进行测量,每种仪器各用2台,分A组和B组。图5(a)和(b)是A组和B组测试数据的对比曲线。
由于实验测得的是一些离散的数据点,为了更好地分析数据,找出其内在的规律性,利用这些离散的数据点,运用最小二乘法进行曲线的拟合并绘制出曲线拟合图,这些用Matlab实现。生成的曲线拟合图如图6所示。
4结语
测试结果表明,采用常规放大电路的仪器在粉尘浓度为3 mg/m3时就进入饱和状态,无法测量粉尘浓度大于3 mg/m3的数据。而采用具有自适应测量功能的仪器在粉尘浓度为10 mg/m3时还具有较好的线性,证明该方法有效地扩大了测量范围,特别是在测量高浓度粉尘的情况下,明显提高了测量的准确性和测试精度,通过对空气的实际测量,具有自适应测量功能的仪器达到了0.01~20 mg/m3的测量范围。
- 听一听大学生使用福禄克产品的真实感受(10-18)
- 特定区域内空气粉尘含量的测控系统(02-06)
- 基于LabVIEW的热舒适测试系统(03-04)
- 基于EPM7128的光栅位移测量仪设计 (03-19)
- 基于FPGA/MCU的光电式滚转角测量仪(11-13)
- 基于8098单片机的脉冲测量仪的研制(01-09)