信号链基础知识 #53 正确调节滤波器各组件以提高降噪效果
在 DC 到低频传感器信号调节应用中,仅依靠仪表放大器的共模抑制比 (CMRR) 并不足以在恶劣的工业使用环境中提供稳健的噪声抑制。要想避免多余噪声信号的传播,对仪表放大器输入端低通滤波器中各组件进行正确的匹配和调节至关重要。最终,才能让内部电磁干扰/无线电频率干扰 (EMI/RFI) 滤波和 CMRR 共同作用,降低其他噪声,从而达到可以接受的信噪比 (SNR)。
例如,请思考图1 所示低通滤波器实施。电阻传感器通过一个低通滤波器网络差动连接至一个高阻抗仪表放大器,而低通滤波器网络由 RSX 和 CCM 组成。理想情况下,如果每条输入支线的 CCM 都完全匹配,则两个输入端共有的噪声量将在到达 INA 输入端以前得到相应的降低。
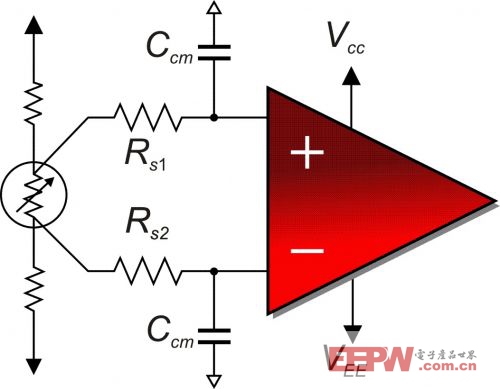
图1共模输入滤波
共模滤波器电容 (Ccm) 完全匹配时,噪声几乎被彻底消除。图2 显示了 TINA SPICE 仿真的这一结果,其将一个 100 mVpp、100 kHz 的共模误差信号注入到 INA333 输入端。

图2INA333 共模滤波的完全输入RC 匹配举例仿真
这种方法存在的问题是现货电容都有一个 5% 到 10% 的典型容差,这就是说如果每条支线的 CCM 反向不匹配,总差动容差便会高达 20%。图3 更好地表示了这种电容不匹配,同时还显示了电阻传感器输出端的共模噪声输入 (eN) 情况。
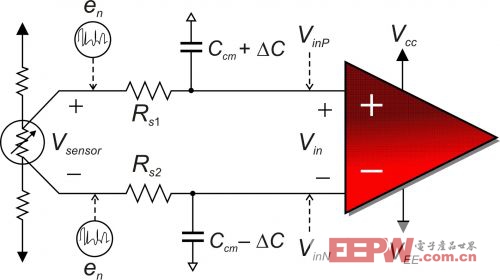
图 3 RC 不匹配和共模噪声注入共模滤波
这种输入不匹配 (?C) 形成截止频率误差,使共模噪声 eN 差动进入 INA 输入,之后被增益输出,成为误差电压。方程式1-3 显示了到达输入端的共模噪声量:
 方程式1
方程式1
 方程式2 2
方程式2 2 方程式3
方程式3
假设传感器信号 Vsensor的频率远低于所有共模滤波器的噪声截止频率(即fC ≥ 100*fsensor),并且 RS1 = RS2,则转换为差动噪声信号 (eIN) 并成为 VIN 组成部分的共模噪声信号 (eN)大小为:
 方程式4
方程式4
方程式4 进一步表明,通过向 INA333 注入一个 100 mVpp、100 kHz 共模误差信号,且1.6 kHz 滤波器截止频率 RC 不匹配为 10% 时,其所产生的误差如下:
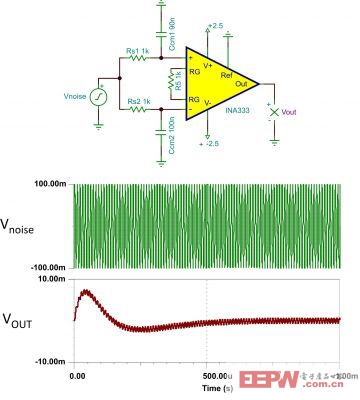
图4共模滤波器RC 不匹配引起的INA333 输出误差仿真(增益为101)
图5 显示了一种更好且更常见的输入滤波方法,其改进是在仪表放大器输入之间添加了一个差动电容 Cdiff。

图5添加差动电容 (Cdiff) 提高共模噪声抑制效果
添加这种电容并没有彻底解决问题,因为必须按照如下两个标准对 Cdiff 进行调节:
1、差动截止频率必须足够高,以远离信号带宽,从而实现充分的滤波稳定。
2、差动截止频率必须要足够低,以将共模噪声降至可接受水平,让仪表放大器 CMRR 能够实现剩余噪声抑制,最终达到可以接受的 SNR。方程式5 给出了进行这种调节的一般原则:
 方程式5
方程式5
图6 显示了 VinP 和 VinN 曲线图与无 Cdiff 和 Cdiff =1 时两种频率的对比情况。请注意,没有差动电容时,INA333 的输出大小有差别。这种差别被放大至输出,成为最终降低 SNR 的噪声。Cdiff =1 F时,VinP 和 VinN 之间的差最小。
时两种频率的对比情况。请注意,没有差动电容时,INA333 的输出大小有差别。这种差别被放大至输出,成为最终降低 SNR 的噪声。Cdiff =1 F时,VinP 和 VinN 之间的差最小。

图 6 Cdiff = 0 和 Cdiff = 1
图7 显示了 Cdiff =1F 时 INA333 输出的总噪声性能改善情况。

图7INA333 使用Cdiff 时获得改善的噪声滤波仿真情况
总之,安装于仪表放大器前部的低通滤波器应该有一个差动电容,且其大小至少应比共模电容高 10 倍。这样,通过减小 Ccm 不匹配的影响,让共模噪声变为差动噪声,从而极大地提高滤波器的效率。
下次,我们将针对主/从系统中 I2S 时钟存在的一些难点为您释疑解惑,敬请期待。
- 某化工厂10KV整流装置谐波分析及治理方案(05-22)
- 几乎没有纹波的快速稳定同步PWM-DAC滤波器(07-06)
- TEK工程师答疑:简化高速串行数据调试验证和一致性测试 -问答精选(07-08)
- TEK工程师答疑:简化高速串行数据调试验证和一致性测试 -问答精选(二)(07-08)
- TEK工程师答疑:简化高速串行数据调试验证和一致性测试 -问答精选(三)(07-08)
- TEK工程师答疑:简化高速串行数据调试验证和一致性测试 -问答精选(四)(07-08)