全方位太阳辐照度测量系统设计
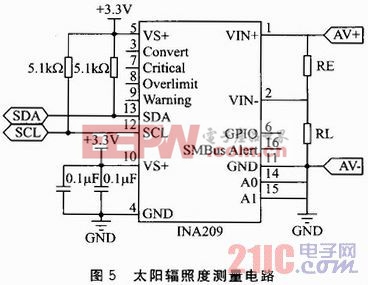
根据双向电流、电压与电源监控器INA209的测量原理和太阳辐照度与太阳能电池发电功率的关系可以计算出太阳辐照度。太阳能电池板电流IRE和太阳辐照度Ep的计算公式如下:![]()
式中,太阳辐照度Ep的单位为W/m2;S为太阳能电池板的面积,其值为637 cm2;ψ为多晶硅太阳能电板的转换效率,其值为12%。
2.4 系统通信部分
系统通信原理框图如图6所示,采用RS485来进行数据的传输。本文的测量平台是放置在较为空旷的室外,以便能采集到较为理想的数据,而接收机(PC机)放置在室内,这两者之间的距离比较远,采用RS485总线进行数据传输能够符合本系统的要求。在此用的是全双工通信方式,即发送和接收可同时进行,互不受影响。采用4根信号线,2根负责接收数据,另外2根负责发送数据。

3 系统软件设计
图7为系统的程序流程。上电后先对BF506F核心板进行初始化,包括初始化UART、ADC、TIMER、PGIO、SPI、TWI等。当系统初始化完成
后便开始运行主程序,首先测量并计算运动控制算法所需要的各个参数,要测量的有纵向电机从水平方向转动到垂直方向的总步数和横向电机从正东方向转动到正西方向的总步数。当计算完参数后就开始执行运动控制算法A,执行完毕后对运动控制算法B的起点进行重新定位,然后执行控制算法B。当执行完运动控制算法B后对运动控制算法的各个数据进行重新测量和计算,如此一直循环下去,直到程序被停止。

算法A中纵向步进电机通过频繁地来同转动可获得纵向上(俯仰角)准确的数据;算法B中横向步进电机通过频繁地来回转动可获得横向上(方位角)准确的数据。此两种算法在不停地交替执行,不但可以在横向和纵向上获取丰富准确的数据,而且可以延长步进电机的使用寿命。
在本系统中,定义正东方向为0°,正南方向为90°,正西方向为180°,通过控制横向步进电机的转动使得太阳能电池板在横向0°和180°之间转动;定义太阳能电池板与地面平行时为0°,太阳能电池板与地面垂直时为90°,通过控制纵向步进电机的转动使得太阳能电池板在纵向0°和90°之间转动。同时还定义横向为X,纵向为Y,则太阳能电池板运动到某一点时可用(x,y)来表示。下面是算法A和算法B的具体执行过程。
算法A的起点为(0,0)点,终点为(180,90)点。纵向步进电机每转动90°,横向步进电机就向180°点(正西方向)方向转动3°,当横向步进电机转动到180°点后就结束算法A。其程序执行顺序如下:
①纵向步进电机从0°点向90°点运动1°。
②判断纵向电机是否到达90°点,“是”则接着运行,“否”则返回第1步。
③横向步进电机从0°点向180°点运动3°。
④判断横向电机是否到达180°,“是”则结束算法A,“否”则接着运行。
⑤纵向步进电机从90°点向0°点运动1°。
⑥判断纵向电机是否到达0°点,“是”则接着运行,“否”则返回第5步。
⑦横向步进电机从0°点向180°点运动3°。
⑧判断横向电机是否到达180°,“是”则结束算法A,“否”则接着运行。
算法B的起点为(180,90)点,终点为(0.0)点。横向步进电机每转动180°,纵向步进电机就向0°点(水平方向)方向转动3°,当横向步进电机转动到0°点后就结束算法B。其程序执行顺序如下:
①横向步进电机从180°度点向0°点运动1°。
②判断横向电机是否到达0°点,“是”则接着运行,“否”则返回第1步。
③纵向步进电机从90°点向0°点运动3°。
④判断纵向电机是否到达90°,“是”则结束算法B,“否”则接着运行。
⑤横向步进电机从0°点向180°点运动1°。
⑥判断横向电机是否到达180°点,“是”则继续,“否”则返回第5步。
⑦纵向步进电机从90°点向0°点运动3°。
⑧判断纵向电机是否到达0°,“是”则结束算法B,“否”则返回第1步。
结语
本系统的硬件实物图如图8所示。设计本系统是为了获取全方位的太阳辐照度数据,其要求是在准确的方位角和俯仰角下采集到精确的太阳辐照度数据。在本系统中,影响数据精度的有两个方面:一是测量电路本身,为了减小太阳辐照度数据的误差,在硬件上改进测量电路,在软件上优化测量算法;二是云台所造成的误差,为了更加准确地定位太阳能电池板的方位,可以改进云台内部的步进电机和齿轮,以及优化云台的控制算法。经过长期地运行本系统,各功能模块工作正常,测得数据真实可靠。
- 力科示波器高速串行数据全方位测试方案(02-06)
- 为油井配备全方位的贴身保镖(09-19)
- 便携式太阳能电池及蓄电池综合测试仪(04-18)
- 紫外辐照计的介绍(03-05)
- 用数字荧光示波器对开关电源功率损耗进行精确分析(11-04)
- 矢量网络分析仪的时域功能在天线测量中的应用(03-03)