为什么抖动测试像盲人摸象(上)
扭曲他们的真正的精度。一致性研究中使用的高斯源用来验证1T中不确定度为1.5%的一份。
估计BER=10-12下Tj的范围是235ps到302ps,除了ScopeC和D给出了和期望值一样的值,大多数测量都在250ps。Pj的正常水平是96ps,因为Pj0和Pj1是不同步的。ScopeB和G给出了在期望值+/-2ps内的最好结果。ScopeF给出了在期望值15%以内的中等值。ScopeC和E给出了期望值一半的结果。这些仪器间在测试DDj时区别更严重,最小值28.4ps和最大值86.2ps。
从测试情况看,很难探知任何方法的准确度。然而,当我们开始改变抖动的每一分量时,码型形成了。
变化的条件
我们做了4个实验,每次改变抖动的一个分量,其他所有的抖动分量均是非常大的压力常规值。如表4所述。

第一个实验是改变Rj幅度,范围3.2~16psrms,这相当于3.125GbpsUI的14~70%。第二个实验是改变Pj1的幅度,覆盖了16~80pspp相当于5~25%的UI。第三个实验是改变频率覆盖了1~3GHz拐角为-3dB的ISI低通滤波器,相当于涵盖了32~96%的速率。第四个实验还是ISI,但是是改变发射数据码型。码型长使用类似于时钟的(“1010···”),混合频率(k28.5),PRBS7,PRBS10,PRBS15。这些码型分别体现了最长为1,5,7,10,15码长。
数据
实验1:不同的Rj
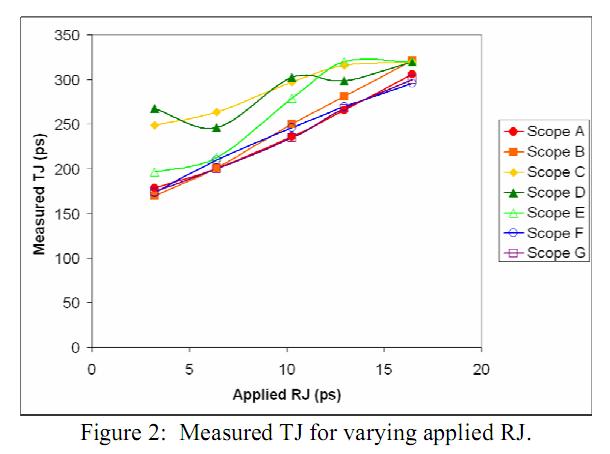
如前所述,在不同的Rj下,Tj遵循斜率为14的线性趋势,截点是Dj。
图2展示了所有7种方法测量到的Tj趋势是Rj的函数。可以看到ScopesA,B,F,G体现了非常一致的响应,测得Tj值差别在10%以内。各自的趋势接近线性,拥有相同的斜率和截点。如果允许大的错误裕量,ScopeC稍有点线性,然而对应的斜率和期望值相差很远。ScopeD和E展示了明显的非线性趋势,这大大超出了预期。
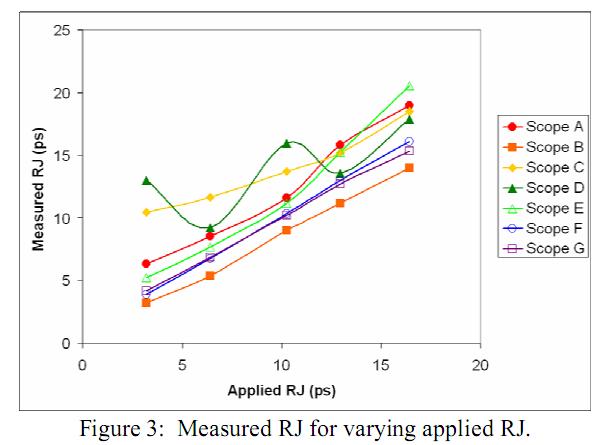
类似的,我们查看测试到的Rj值并和应用的Rj值比较,在这种情况下,预测到的趋势是线性,但是一个斜率和截点接近于0(由于微小的固有抖动)。图3展示了不同Rj的测量值,ScopesF,G拥有和预期最接近的趋势。ScopeB展示了相同的趋势,但是Rj最小。ScopesA和E展示了对于低的Rj预期响应,但是高Rj值背离。ScpeC虽然表现出来了一点线性,但是有过小的斜率和过大的截点。ScopeD的宽波动范围体现了高非线性。
Djpp值是独立于Rj,但是在Dual-Dirac模型中使用了依赖于Rj变化的Dj定义。Djpp值不会随着Rj的变化而变化,但Dual-Dirac中Dj趋势是随着Rj的增加而减少。
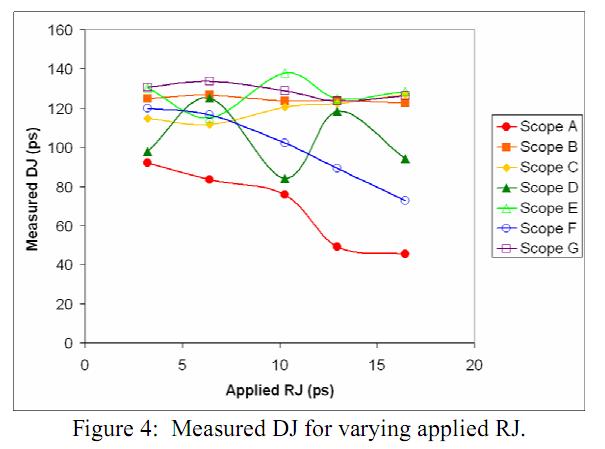
图4展示了Dj的测量值随着Rj变化的趋势。ScopesB,C和G遵循Djpp预期的平坦响应。ScopesE虽然在相同的范围内,但是展示了明显的非线性特性。ScopesD再次展示了大的波动。
ScopesA和F报告了Dual-Dirac模型中Dj的依赖定义,并展示了预期的下行斜率。
这个例子说明了用户需要知道他们的测试方法是否和他们的测试目的一致,不能低估这种错误。ScopesB,C,G的结果表明他们报告Djpp值,将会产生一个高的Dj值和由Dual-DiracDjpp引起的Dj一致性裕量误差。这就是Dual-DiracDj模型对于串行数据规范约束而不是Djpp值,这总是导致Dual-DiracDj小于Djpp值。
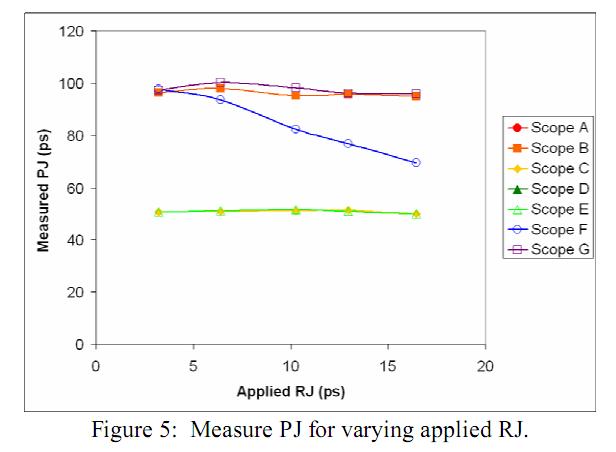
Pj是和Rj无关的,对于不同的Rj值希望它拥有一个平坦响应。图5展示了Pj测量值随着Rj变化的趋势。只有ScopesB,C,E,F,G获得了Pj值。注入的总Pj大约是96ps。ScopesB和G在正确的值上体现了相对的平坦趋势。有趣的是,在预期值的一半ScopesC和D拥有相同的表现。当可以准确地辨识多种Pj分量时,决定了ScopesC和D仅仅在结果上反映巨大的单一Pj。
实验2,不同的Pj1幅度
第二个实验是改变Pj。常规条件下的Pj包括Pj0和Pj1。Pj0的频率和幅度是恒定的,只有Pj1的幅度是变化的,从而导致了总Pj的变化。
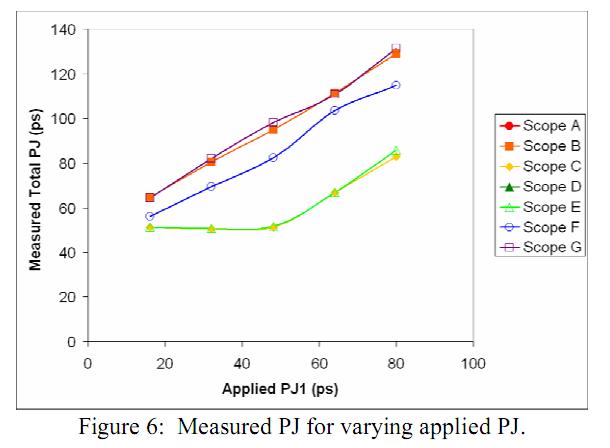
总Pj的测量值是是斜率为1和截点是48ps呈线性趋势Pj1幅度的函数。图6展示了总Pj测量值的特性。我们看到ScopesB和G拥有和预期非常接近的趋势。ScopeF拥有预期的斜率,但是在整个范围内低估了10ps。这和前节分析的PjvsRj是一致的。ScopesC和E是不规则的,但是和仅报告了巨大的单一Pj分量的观点是一致的。
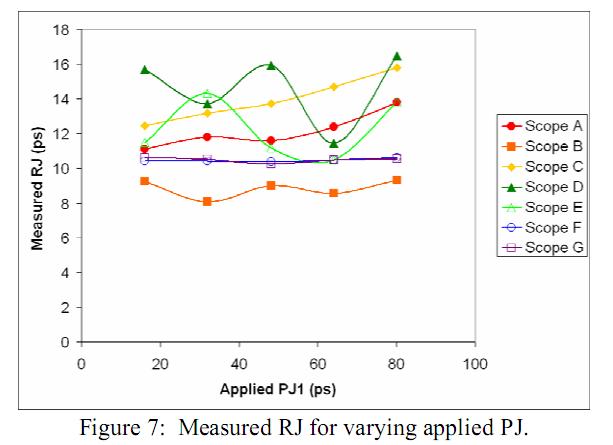
对于不同的pj1幅度,Rj预期都是不变的9.6ps。图7展示了Rj测量值。我们看到ScopesF和G的趋势是非常平坦和靠近期望值的。ScopesB,A和C越来越背离预期趋势。ScopesD和E则呈非线性和大的波动。
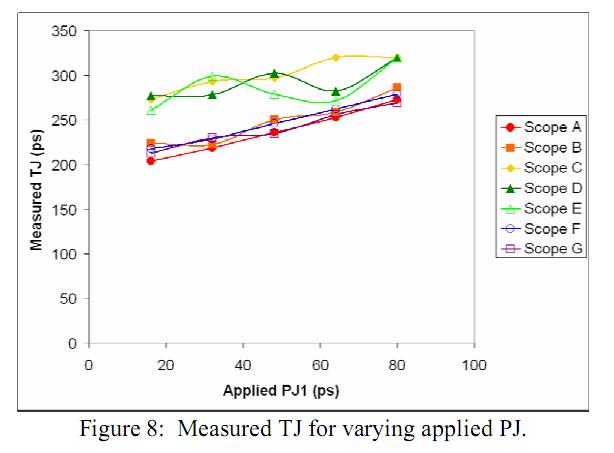
Pj和Rj的趋势,还有其他的抖动分量,最终现出Tj的趋势。图8展示了Tj测量的特性。ScopesB,F,G的Pj和Rj测量精度直接决定了Tj的的测量精度。同理,ScopesD,E的Rj测量的差劲表现将直接导致Tj测量的差劲表现。
实验3:不同的码型长度的ISI
另一个产生ISI的方法起源于数据信号边沿的幂指数传输。这种方法显示,当数据码型最大的码型长度在低码型长度
抖动测试盲人摸 相关文章:
- 为什么抖动测试像盲人摸象(下)(12-26)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)