浅谈光纤陀螺仪轨道方向不平顺检测系统设计
偏差重复性(offset) 1°/hr,1 sigma;偏差变化(恒稳态)0.3°/hr,1 sigma;比例因子37mV/°/s±10%;外部磁场<1°/hr/Gauss;输出阻抗1000Ω。由此可以看出,VG951是一种稳定性好、漂移小、重复性好、抗磁能力强的性能优异的光纤陀螺仪产品。
陀螺仪用于检测轨向时输出信号很微弱,因此,必须选用低噪声运放电路,并合理设置滤波电路。本系统选用高精度低噪声的仪用放大器AD620,其最佳源电阻在1000Ω左右,正好与VG951相匹配,能最大限度地减少由于电路阻抗不匹配产生的噪声[6] 。该放大电路与无源 RC滤波电路组合,能够有效保证前置放大电路的品质。
AD 公司的A/D转换器AD7714[6]是一款带信号处理功能的串行A/D,可直接从传感器接受低电平信号,使用和差转换技术实现高达24bit的无误码模数转换。AD7714内置数字滤波功能,可编程设置滤波器的截止频率和稳定时间。本系统可同时接受和处理二路VG951的输入。 AD7714参考端电压(+3.0V)由AD780提供。
陀螺仪信号是双极性信号,且信号地与电源地相通。虽然AD7714可以接受双极性输入,但有一个限制条件,即信号相对于AGND的电压不能低于-30mv。因此,必须将陀螺仪信号平移一个基准电压(+1.5V),该电压由AD780分压提供。
系统以Philips公司的P89V51RD2[8]为控制与数据处理中心。P89V51RD2是一种高性能的80C51兼容型单片机,片内内置64K程序存储器,768+256Byte数据存储器,可利用 Philips提供的ISP/IAP程序实现系统的在线编程(在系统或在应用编程)。该CPU管理并控制着数据采集过程,由T2 定时器给AD7714的数字积分提供精确定时,并完成陀螺仪测量数据的实时分析与处理工作。图1为简化硬件原理图。
同时,P89V51RD2还是与轨检小车主CPU进行数据通讯的控制器,成为轨检小车多CPU主从结构的一个基础端点。
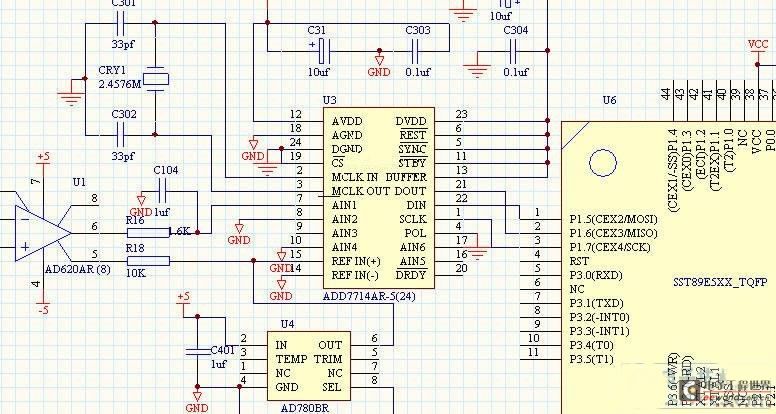
图1 简化硬件原理图
光纤陀螺仪轨道方向不平顺检测系 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)