labview深入探索----谈谈LABVIEW的几种定时器
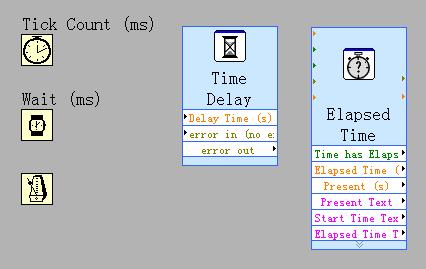
首先看看Tick Count 节点的帮助说明:
返回毫秒定时器的值.
基准参考时间(0 毫秒)未定义,也就是说,不能把返回的毫秒数直接转换成现实世界的时间和日期.必须注意当你使用这个函数进行比较的时候,毫秒定时器达到2^32-1后反转成0.
基准参考时间未定义,说法比较模糊,难道会是个随机数,那显然不可能,如果是随机数,那两次调用TICK COUNT取得差值就不可能表示经过的毫秒数.无论如何,必须有个时间的起点.
API函数中也有一个类似的函数:GetTickCount,该函数返回计算机启动以来经过的毫秒数.在9X中,它读取的是BIOS中保存的系统时钟的滴答数,早期PC的ROM初始化Intel8259定时器芯片来产生硬件中断08H。这个中断有时称为"定时器滴答"中断。中断08H每隔54。925毫秒产生一次,或大约每秒18.2次。BIOS使用中断08H更新存于BIOS数据区的"时间"值.这就是长说的55MS的由来.对于NT操作系统,常规的说法是能精确到10MS,也就是说精度在1MS时是不精确的.
经过实际测试,LABVIEW的TICK COUNT的返回值和API的返回值是一致的,也就是计算机启动以来经过的毫秒数.
毫秒数达到2^32-1后反转成0,可见它的数值形式是U32,最大值是2^32-1,大概相当于49.7天.对于一个连续运行的计算机,用这个节点进行比较的时候,在连续运行49.7天后,该值自动恢复到零,如果在这个时刻进行比较,可能会出现错误的结果.
wait(ms)节点帮助文件中的解释是这样的.
等待指定的毫秒数并返回毫秒定时器的值(上面提到的计算机启动以来的毫秒数).如果WAIT (MS)连接0会强迫当前线程放弃控制权.
WAIT 0MS是一个相当重要的特点,相当于VB 的DOEVENTS,CVI中的PROCESSSYTEMEVENTS,实际是归还控制权给操作系统,来处理队列中的其他消息,如果没有消息需要处理,系统马上把控制权交给这个线程,继续运行.
这里有两种情况,如果系统消息队列中无需要处理的消息,立即返回,如果系统消息队列中有消息需要处理,并且是一个耗时操作,无法预料LV线程何时再次取得控制权.我们比较LV是否加WAIT 0MS的速度.
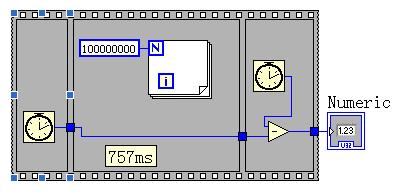
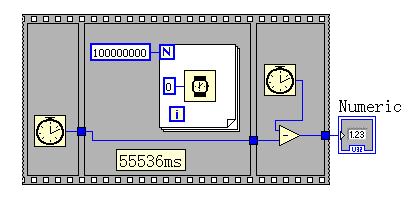
实验过程中未执行其它任何操作,避免了处理其他消息造成的影响.两者之间,差距是惊人的.这也体现了LABVIEW的一个优点,对于一个倾向于硬件控制的编程软件,它有着极强的任务抢先能力.
在一个循环里多次并行执行WAIT,是累加时间,还是按最长的执行那,实际上是异步的还是同步的问题.我们做一下实验.
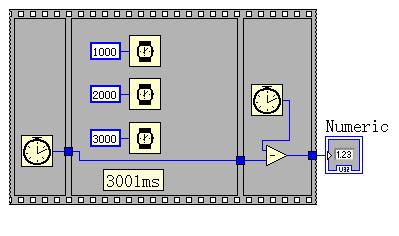
可见,这三个WAIT是同时执行的.
由于WAIT是基于线程的,一个循环里的WAIT不会影响同时运行的其它线程的运行.
看看WAIT UNTIL NEXT MS MULTIPULE(等待下一个毫秒的整数倍).
一直等到毫秒定时器变成指定时间的整数倍.可以用于在一个循环中调节循环的执行速率.但是第一次的循环周期可能比较短.可以直接连接0到这个节点,强迫当前线程放弃控制权,归还给CPU.
相比WAIT MS,这个节点在循环中更为常用,对于几个采用相同参数的WAIT UNTIL NEXT MS MULTIPULE,可以实现不特别精确的同步.由于LABVIEW的循环的特点,首次是立即执行的,所以第一次是不能保证同步的.如果必须要保证同步的话,可以在循环中第一次执行空循环来避免这个问题.
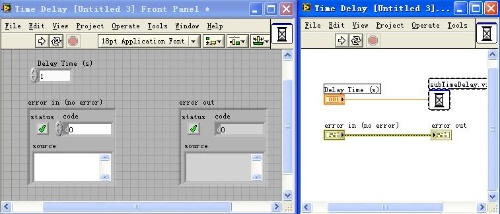
LABVIEEW EXPRESS中也提供了两个快速VI,一个相当于WAIT MS,另一个可以实现非常复杂的定时功能.
我们先把TIME DELAY EXPRESS VI转换成常规VI,跟踪一下它是如何实现的.
进一步跟踪SUBTIMEDELAY
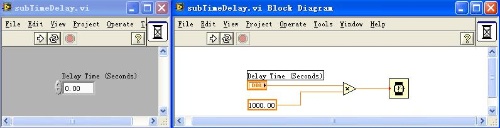
可见,实际上还是调用的WAIT MS,不过是数据类型换成的DOUBLE,表示秒数,同时增加了错误簇,有利于实现顺序延时动作.其他完全等同于DEALY MS.
可能是在LV7.1后新增加了这个ELAPSED TIME快速节点,这是一个非常有用的定时器.先介绍一个OPENG中提供的比较简单的定时器.
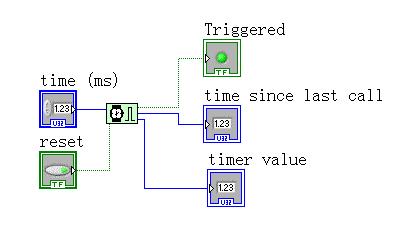
这是一个周期软件定时器.可用于周期性地循环触发事件.
看看它是如何实现的.
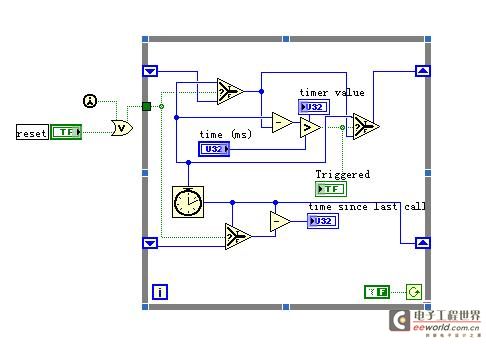
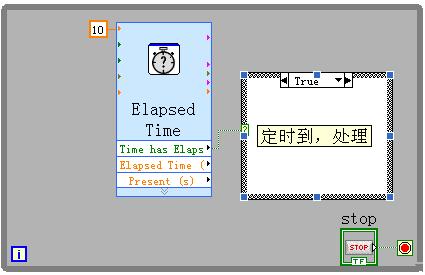
LV的elapsed time 功能远比上面的VI功能强大,可以实现复杂的控制功能.
1.循环定时触发一个事件.
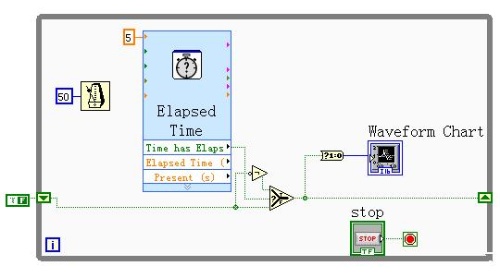
2.输出一个方波 (5秒)
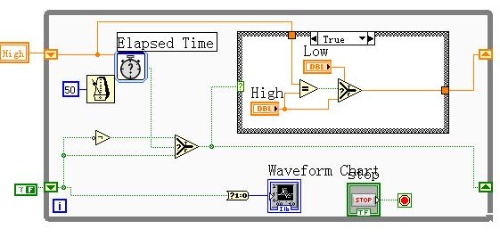
3.PWM波形.
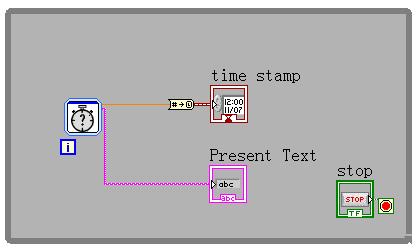
4.系统时钟
labview定时 相关文章:
- labview中的的几种定时器(02-06)
- LabVIEW的定时与同步功能实现(01-09)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)