使用LabVIEW和PXI定位飞行过程中飞机的噪声源
挑战:
开发一个测量系统来定位飞行过程中飞机的噪声源。
解决方案:
基于NI LabVIEW软件搭建一个应用程序,并使用NI PXI硬件从布置在跑道上的相位麦克风阵列采集数据。
研究客机上的噪声源
为了能开发出更为安静的客机,我们必须定位所有的噪声源,以加强我们对噪音生成原理的认识。在开发一架飞机时,我们可以通过数值分析和模型测试预测噪音等级。然而,实际飞机噪音的属性和特性只能在实际飞行测试中才能获得。利用声音波束成形技术来定位噪音源定位是一种有效可行的方法。波束成形是一种使用相位麦克风陈列定位噪声源的方法,同时能获得噪声源的振幅。虽然我们在JAXA项目上小型模型飞机的风洞测试和飞行测试中已经发展并改进了这项技术,但还未曾将这项技术应用于实际飞行的飞机中。2009年,我们拥有了一架小型Mitsubishi MU-300 Diamond商务机。2010年,我们开始在跑道上设置了相位麦克风陈列,通过噪声源定位测量来验证我们现有的技术,并找到可以提高的空间。
相位麦克风阵列的测量
相位阵列包含了许多麦克风,分布在一个大直径的范围上。利用噪声源的声波到达每个麦克风时间的微小差别,我们可以估算出每个噪声源的位置和强度。在这个测试中,我们设计了相位阵列来辨识飞行于120米高度的飞机上两个相距4米的1kHz音频信号。这个相控阵列包含了99个麦克风,分布在一个直径30米的圆形区域上。
飞行中的噪声源定位测试必须包括飞机发动机状态,声觉测量,飞机飞过相位阵列时的位置、高度和速度。因为飞机产生的噪音传输到地面上麦克风的过程中会被大气削弱,因此我们还需要记录气象数据,例如风向、速度、温度和湿度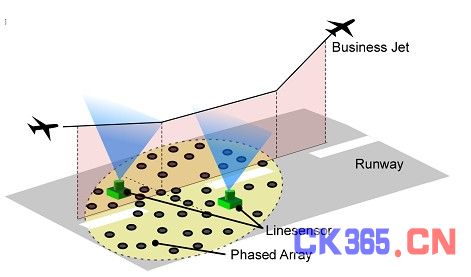
图1:跑道上的相位阵列和线扫描摄像机
图2:相位麦克风阵列
图3:线扫描摄像机
我们系统主要的一个特性是能对声音和飞行参数进行同步测量。我们将两台线扫描摄像机与地面上的相位阵列放置在一起,从而完成了这个测试。如图1所示,这两台摄像机分别直立在飞机飞行方向的两个侧边。摄像机能捕捉经过飞机的同步图像,并提供3D信息以便于我们分析飞机飞行速度和高度。另一台电脑通过获取的声音数据同步进行噪声定位处理。这些数据会在飞机飞过相位阵列后很快进行结合,从而将噪声源地图叠加显示在飞机图像上。
测量系统
我们选用了NI PXI系统及大量的模块来达到紧凑系统的要求。我们的系统包含了一个嵌入式控制器和一个NI 8260, 一个4驱动、可插入机箱型、高速数据储存模块。LabVIEW、NI视觉开发模块和NI声音与振动测量套件为我们的方案开发提供了有效的工具。我们的系统能进行快速设置、数据记录、实时监测和数据浏览。我们将其装载在移动平台上以获得更好的便携性。
NI PXI-4498动态信号采集模块通过集成电路式压电(IEPE)调理为麦克风提供电能,并能够同时采集高分辨率的数据。由于每个模块可以处理16个通道,7个模块可以同时对112个通道进行采样,并且还具备了进一步扩展的空间。
NI PXI-1428图像采集模块可以利用线扫描摄像机进行线扫描数字成像。我们使用NI视觉开发模块开发的应用程序将自动处理这些被采集的图像。此外,NI PXI-6682H定时和同步模块可以通过GPS进行同步来对数据进行时间标识,并能对飞机中的噪音和地面上的噪音进行协调处理。
图4:我们将PXI测量系统放在一个平板车上,从而使得系统能够更加接近麦克风阵列。
图5:MU-300 Diamond商务机
我们于2010年11月16日至18日在北海道大树航空航天研究所进行了飞行测试。MU-300商务机进行了一系列重复实验来模拟不同飞行高度和速度下的起飞和降落,而我们则同时在地面和飞机内进行测量工作。图6展示了飞机在降落设置时1000Hz和2000Hz的噪声定位图结果。对于1000Hz噪声,我们确定了更高振幅(红色表示)的噪声源是在主起落架附近,靠近襟翼的外边缘和发动机喷管的地方。对于2000Hz噪声,我们发现噪声源靠近发动机喷管,主起落架和前起落架,但不会出现在襟翼的外边缘处。通过这个测试,我们展示了对飞行中飞机的多个噪声源进行定位的技术。
我们会继续提高我们噪声源定位技术的精确度,并开发更深入的噪声源属性评估,如噪声光谱。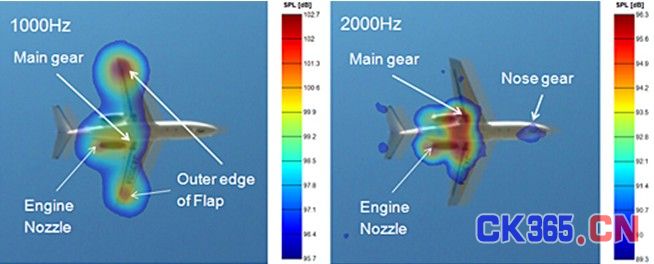
图6:显示飞机处于降落设置(放下襟翼,放下起落架,发动机怠速,高度60米,飞行速度60米/秒,水平飞行)时,在1000Hz和2000Hz时的噪声源
LabVIEWPXI噪声 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)