基于TMS320LF2407A DSP的PFC级电路的原理与设计
增益Ks和PFC输出直流总线电压感测增益Kd分别表示为:
Kf=1/Vmax
Ks=1/Imax
Kd=1/Vo(max)
式中,Vmax为整流的输入电压Vin最大允许幅值,V;Imax为输入电流Iin的最大允许幅值,A;Vo(max)为直流总线电压最大允许值,V。
3.2 输入电压前馈软件的实现
输入电压前馈能使输入功率保持在规定的电平上,不随AC线路电压波动而变化。
为计算输入电压Vin的平均成分Vdc,需要计算信号频率f(=1/t),然后对一个周期上的信号进行积分,如图3示图所描述。
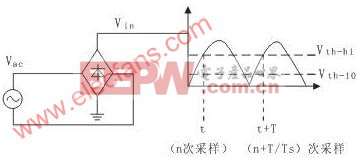
图3 和Vin平均成分的计算
3.2.1 频率计算
在频率软件执行期间和其后的平均Vin的计算,每当信号跨越上门限Uth-hi时,Vin的采样数(N)被计数并被保存。信号的下门限Uth-Io用于获得抗扰度。若采样周期为Ts,采样频率为fs=1/Ts。Vin的周期为T,N=T/Ts。若N为已知数,每单位(per unit, Pu)频率fpu的计算公式是:
式中,fmax为Uin的最大频率,Hz;Nmin为Uin一个周期上的采样最小数。计算频率的用户软件利用N值,首先计算中间值1/N,然后与Nmin相乘得到fpu值。为保存1/N值,并带最高精度,不引起累加器溢出,知道Nmin值是很重要的。为此,用户应当选择信号最大频率以被测量。一旦知道Nmin值,1/N量可以被保存,并带最大精度且用适当的定点表示。例如,对于一个输入工作频率为47~63Hz的PFC变换器,最大输入频率可以选择70Hz。然后用fmax=140Hz(两倍的输入频率)和已知的Ts值来计算Nmin,是非常容易的。
3.2.2 前馈成分计算
只要知道信号Vin的频率,它的平均成分Vdc可用下面公式计算:
式中,T为相应于Uin频率f的时间周期, S;Vin(i)为Vin的数字化i次采样。
由于Vin作为相对于它的最大值Vmax的每单位(pu)规格化值被测量,所计算的Vdc值也是一个带Vmax规格化基本值的每单位(pu)量值。对于一个正弦波输入电压,Vac的最大值仅为2Vmax/π。因此,在Vac的固定点表示中,为获得最佳精度,先前计算的值相对于它自己的最大值被转换为每单位规格化量值,这个值由下式给出:
Vdc1的倒置电压Vinv(即Vinv=1/Vdc1)在Vdc1最小时值最大,反之亦然。为在Vinv固定点表示中获得较高的精度,需要用相对于其最大值的每单位(pu)规格化值来表示。对于一个正弦波输入电压,Vdc的最小值是2Vmin/π。输入电压最小幅值Vmin的选择,基于PFC变换器的输入电压范围。例如:若PFC变换器的低线路RMS电压是90V,Vmin值应低于或等于127V( )。Vinv的最大值为(Vminπ/2),相对于它自己最大值的相应Vinv的每单位(pu)值为:
3.3 乘法器增益Km
乘法器增益Km的调节,应能在最低输入电压上,当PFC变换器交付最大负载时,使参考电流Iref是在它的最大值上。在图2中,Iref为
随电流环路闭合,Iref可表示为
在最低工作电压Vinv=1时,满载下的电压控制器输出将在它的最大值上,即Vnv=1。因此,在最低工作电压上,为产生最大参考电流,要求Km值为:
3.4 电压和电流环路补偿器
电流环路功率级高频近似值为:
根据图2所示的PFC控制框图,电流环路增益等式为:
式中,Fm为调制器增益, 
调制器在软件中部分地执行,并部分地利用DSP PWM硬件。软件利用调制器输入,即电流控制器输出Uca,计算在TMS320LF2407A中PWM硬件模块的占空比值。PWM硬件利用占空比值,为PFC开关产生适当的PWM信号。当调制器输入Uca是1时,软件保证调制器输出即PWM占空比为100%。在此情况下,调制器增益Fm=1。因此,对于电流环路的交越频率fci,需要的电流误差放大器补偿器可以表示为:
只要电流环路闭合,电压环路功率级传输函数可按下式计算:
式中,Zf为输出电容CO和负载阻抗ZO组成的并联分支的等效阻抗,Zf=ZO/(1+sCOZO);负载阻抗  。
。
图2中电压环路增益等式如下:
电压环路交越频率fcv需要的电压误差放大器补偿器为
3.5 电压和电流环路补偿器软件的实现
先前给出的电压和电流环路控制器,在它们利用TMS320LF2407A在软件中被执行之前,被变换为如下说明的等效数字形式,电流控制器可以写为:
式中:KP为已计算的电流补偿器量值;E为电流误差信号。
电流环路补偿波德(Bode)曲线如图4所示。其中:顶部为电流环路控制单元增益Gid、Fm和KS曲线;中间为补偿器Gca增益曲线;底部为所期望的环路增益Ti曲线。功率级有一个-1的斜率,在期望的穿越频率fci上放置零点fz,可以产生一个45°的相补角。然而,由于控制环路采样和补偿延时,相补角的一部分被损失,因此将fz放置到图4所指示的位置,以补偿相补角损失。

图4 电流环路补偿波德曲线
4、PFC级数字控制器设计实例
在本
原理 设计 电路 PFC TMS320LF2407A DSP 基于 相关文章:
- 简述数字电位器基本原理与基本特性(12-09)
- 工程师福利:倾情奉献无线充电器设计原理及BOM清单(12-09)
- 集中器侧硬件原理图设计(12-09)
- 开关电源原理与设计主要器件之开关电源变压器(12-09)
- 变频器工作原理及控制方式介绍(12-08)
- 小型UPS电源的原理与维护(12-08)