一种改进型零电压开关PWM三电平直流变换器的研究
1),滞后臂会有足够能量吸收寄生电荷,实现宽范围ZVS。同时在加入饱和电感后,由于滞后臂有励磁电感参与谐振,谐振条件与负载关系不大,所以在设计原边谐振电感时可以尽量减小该电感,这样,根据文献[2]对占空比丢失的讨论,可以减小副边占空比丢失。
饱和电感的特性相当于磁开关,在电流小于Ic时,饱和电感不饱和,电感量很大,磁关断输出整流二极管,这样有效地阻挡了由输出二极管产生的反向恢复电流,从而减小了由二极管寄生电容和变压器输出漏感引起的电压振荡,同时减小电压尖峰。
3 饱和电感的设计
本文讨论的是VITROPERM 6050Z钴基非晶磁芯,它的磁导率为2000~3000,具有非常低的磁芯损耗和非常高的矩形比,当电流在接近零时具有非常大的电感量。这个很大的电感量可以有效地阻挡由二极管产生的反向恢复电流。该磁芯在比较小的电流条件下就可以进入饱和。
饱和电感的磁滞回线如图2所示,其工作过程如下:到达工作点1时(电流导通),磁芯处于饱和状态,具有非常低的电感量。当电流关断时,工作点到达剩磁点2。二极管的反向恢复效应使得电流向小于零的方向减小,这时,由于钴基非晶有非常高的磁导率,因此它的电感量很大,有效地抑制了二极管的尖峰电流,实现了二极管的软恢复。由于高电感值,阻止了磁芯工作在工作点3,而留在反向剩磁点4,然后被磁化开始下一个循环。
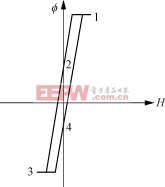
图2 磁滞回线
一般来讲,饱和电感的磁通急匦肼足式(2)。
φ·Sa≥π·trr·Vr·Io![]() (2)
(2)
式中:Sa为磁芯截面积;
J为铜线电流密度;
Fcu为铜线填充系数,对于绕线磁芯电感,取Fcu=0.3~0.4;对于铜线径磁芯电感,取Fcu=1;
trr为输出二极管反向恢复时间;
Vr为输出二极管反向电压;
Io为输出电流。
所以具有中等线电流密度(2A/mm2)的铜线径磁芯电感,式(2)可以简化为
φ·Sa≥1.5·trr·Vr·Io (3)
饱和电感的线径dcu为
dcu= mm (4)
mm (4)
所以,绕线圈数N为
N≥π·trr·Vr/φ (5)
4 峰值电流控制的稳定性分析
4.1 峰值电流控制原理
峰值电流型控制是20世纪80年代出现的新控制模式,它具有动态性能好;输出精度高;增益带宽大;瞬间限流保护等特点。目前许多移相控制ZVS多采用此控制系统。当然移相三电平ZVS也不例外。
如图3所示,系统将代表开关管瞬态电流动态信号VL与一个固定开关频率、幅值很小的锯齿波信号Vm相叠加(锯齿波是斜率补偿,下面将会讨论),然后再与参考电压信号Ve进行比较,共同决定导通桥臂的移相角α。这样组成了一个电压外环,峰值电流内环的电流型控制系统。4个开关管的占空比D是固定保持在约50%的,只是导通桥臂移相角α决定了变压器能量转换的伏秒值,它是既与参考电压成正比,又与开关管的瞬间电流峰值相关,这样保证了开关管的瞬间电流峰值跟随参考电压的变化。该控制模式具有与移相控制结合的能力,并实现瞬间限流调整,可以对开关器件进行动态保护,同时也可以自动保持高频功率变压器的动态平衡。
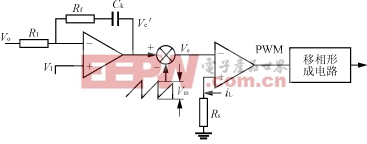
图3 峰值电流的反馈电路
4.2 峰值电流系统斜率补偿的讨论
在峰值电流型控制中存在一个比较突出的问题,即在连续模式移相占空比Dα>50%时,随着偏移量Δi变化,经过几个状态周期的推移,偏移量将会越来越大,这样闭环系统将进入不稳定,引起次谐波振荡,电感电流振铃等。为了保证系统稳定需要通过斜率补偿的方法来实现系统稳定,这样虽然牺牲了一些系统增益,但会使系统在移相占空比Dα>50%时保持稳定。系统稳定性与斜率补偿的关系如图4所示。以下是它的斜率补偿稳定分析。
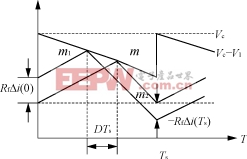
(a) 一个周期的总图
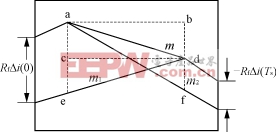
(b) 局部放大图
图4 斜率补偿图
由几何关系可知
Rf·Δi(0)=ac+ce=ab·m+ab·m1
-Rf·Δi(Ts)=bf-bd=ab·m2-ab·m(6)
式中:m为补偿信号上升斜率;
m1为电感检测电流上升率;
m2为电感检测电流下降率。
所以,经过一个开关周期后,输出电感中电流的变化为
Δi(Ts)=Δi(0)· (7)
(7)
同理,经过n个周期后,输出电感的电流变化为
Δi(n ·Ts)=Δi(0)· (8)
(8)
要系统稳定,偏移电流量必须趋近于零,即
![]() =|Δi(n·Ts)|=0 (9)
=|Δi(n·Ts)|=0 (9)
故系统稳定的充要条件是
 1(10)
1(10)
因为在稳定条件下,D ·m1=(1-D)m2,消去m1,整理后,移相峰值电流控制系统稳定充要条件为
 (11)
(11)
由式(11)可知,当没有斜率补偿时,即m=0,必须要求移相占空比Dα0.5,这就是理论上不
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)