降斜率m2的1/2。对图1所示的Buck型变换器,m2等于(VO/L)RS。所以补偿波形的幅度A应按下式计算:
A>T*RS(VO/L) (5)
从而保证变换器的占空比大于50%时变换器能稳定工作。在 控 制 工 程 实 际 中 , 补 偿 斜 率 m一 般 取 为 m=(0.7~ 0.8)m2, 这 样 既 保 证 了 系 统 符 合 稳 定 条 件 , 又 保 证 了 系 统 动 态 指 标 。
2.2次谐波振荡
对电流型控制而言,内环电流环峰值增益是个很重要的问题,这个峰值增益在开环频率一半的地方,由于调制器的相移可能在电压反馈环开关频率一半的地方产生振荡,这种不稳定性叫做次谐波振荡
2.3 峰值电流检测与平均电流检测
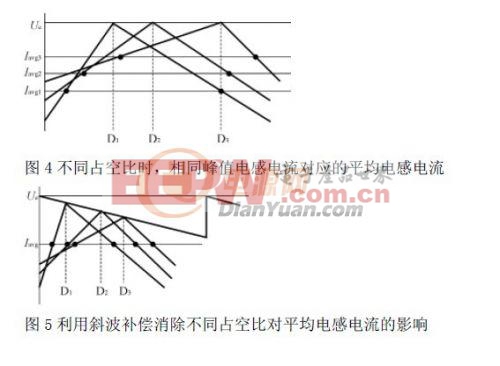
在电流型变换器中由平均电感电流产生一个误差电压,这个平均电感电流可用一个电流源来代替,并可以降低系统的一个阶次。减小峰值电感电流与平均电流的误差电流模式控制是一种固定时钟开启、峰值电流关断的控制方法。因为峰值电流(流过功率开关或电感上)在实际电路中容易进行采样,而且在逻辑上与平均电感电流大小变化相一致。但是,电感电流与输出平均电流之间存在一定的误差,峰值电感电流的大小不能与平均电感电流大小一一对应,因为在占空比不同的情况下,相同的峰值电感电流可以对应不同的平均电感电流,如图4所示。
而平均电感电流是唯一决定输出电压大小的因素。与消除次谐波振荡的方法类似,利用斜波补偿可以去除不同占空比对平均电感电流大小的影响,使得所控制的峰值电感电流最后收敛于平均电感电流,如图5所示。 在数学上可以证明,将电感电流下斜坡斜率的至少一半以上斜率加在实际检测电流的上斜坡上,可以去除不同占空比对平均电感电流大小的扰动作用,使得所控制的峰值电感电流最后收敛于平均电感电流。因而合成波形信号UΣ要有斜坡补偿信号与实际电感电流信号两部分合成构成。当外加补偿斜坡信号的斜率增加到一定程度,峰值电流模式控制就会转化为电压模式控制。因为若将斜坡补偿信号完全用振荡电路的三角波代替,就成为电压模式控制,只不过此时的电流信号可以认为是一种电流前馈信号,见图1所示。当输 出电流减小,峰值电流模式控制就从原理上趋向于变为电压模式控制。当处于空载状态,输出电流为零并且斜坡补偿信号幅值比较大的话,峰值电流模式控制就实际上变为电压模式控制了。
2.4 小纹波电流
从性能的角度总希望纹波电流要小,首先它可以使输出滤波电容的容量减小,并在轻载时的电流连续工作模式下输出纹波小。虽然对电流检测电路的小斜坡补偿量,在许多情况下可以得到小的纹波电流,但将由于随机和同步噪声信号的引入而致使脉冲宽度摆动。并且斜坡补偿加到电流波形上将会产生一个更稳定的开关点,为达到这个目的,相对于电感电流这个补偿量m应大于m2,并且这对次谐波稳定是有必要的。但任何斜坡补偿大于m=-(1/2)m2将使变换器的特性偏离理想电流型变换器而更像一个电压型变换器。
2.5 电流型控制不大适合于半桥型开关电源。
这是因为在半桥式电路中,通过桥臂2只电容的放电维持变压器初级绕组的伏-秒平衡;当电流型控制通过改变占空比而纠正伏-秒不平衡时,会导致这2只电容放电不平衡,使电容分压偏离中心点,然而电流型控制在此情况下试图进一步改变占空比,使电容分压更加偏离中心点,形成恶性循环。
3 电流型控制的斜波补偿实例
3.1 3842补偿实例
美国UNITRODE公司生产的电流型PWM控制芯片UC1842/43,具有外电路简单,成本较低等优点。关于它的电性能与典型应用这里不再赘述,只简单介绍一下进行斜波补偿的方法。图6说明了UC1842/43的2种斜波补偿方法:
第一种如图6(a)所示,从斜波端(即脚4振荡器输出端)接一个电阻R1至误差放大器反相输入端(脚2),于是误差放大器输出呈斜波状,再与采样电流比较。第二种方法如图6(b)所示,它从斜波端(脚4)接一电阻R2至电流采样比较器正端(脚3),这时将在Rs上的感应电压上增加斜波的斜率,再与平滑的误差电压进行比较。用这2种方法,均能有效地改善电源的噪声特性。

3.2 UC1846的斜坡补偿
UC1846是一种采用斜坡补偿的电流型集成控制芯片,它具有恒频PWM电流型控制所需的控制电路和相关电路。图7(a)和图7(b)表示采用UC1846实施斜坡补偿的两种电路原理图。在第4脚的电流检测信号和斜坡补偿信号直接相加很容易实现,但这又在电流检测电路中引入了误差。另一种方法就是把这个斜坡补偿加至误差放大器的反相输入端,采用这种方法的前提条件是:
图7 UC1846采用不同斜坡补偿方法的电路原理图

(b)斜坡补偿信号直接和误差信号相加
——开关频率固定(这种情况下