利用数字反馈环路自由地定制电源产品
传统的模拟SMPS设计使用这两种控制技术之一,最终取决于成本和可用技术。
电压模式控制是比较老的方法,在大多数早期的SMPS设计中经常被采用。它使用斜坡发生器和电压比较器将来自误差放大器/环路滤波器的误差信号转换为PWM脉冲宽度。简单的电压模式控制方法有三个基本局限性。第一,没有限流机制保护电路元件。第二,它对输入或输出瞬变的反应很慢。第三,它产生的反馈环路不稳定。
电流模式控制是更好和更安全的控制方法,它由双环格式组成。内部电流环设计用于将电感充电到输出电压环路规定的峰值电流。外环类似于电压模式控制的反馈环路,主要用于监视输出,对反馈进行相位/频率补偿,并调节电流环传送的能量。
因为内环以逐个周期为基础调整电感电流,因此电感实际上不会记忆上个脉冲,不会运送前个周期的能量。它还能为晶体管提供峰值电流保护,消除磁性元件中的“棘轮效应”,抑制输入电压的变化,并提供方便的控制环路补偿。
数字SMPS设计中电流模式控制的高效实现依赖于使用DSC。DSC具有板上PWM外设,其工作方式与电流模式PWM发生器相同(图3)。不同点在于数字反馈的输出。电压模式设计使用反馈直接控制PWM的占空比。在电流模式设计中,DSC的PWM具有基于比较器的脉冲终止功能,可以根据电流反馈调节脉冲宽度,并且数字到模拟转换器(DAC)的输出由数字反馈驱动。
电流模式控制是通过计算SMPS设计要求的PWM频率和最大占空比、然后用这些参数配置PWM计数器实现的。这就设定了最大的占空比和系统的脉冲频率。接下来设计必须调整参考DAC输出来处理有望最大范围的电流反馈信号。这样做可以在控制PWM占空比时提供最高的分辨率。
最后,还必须开发用于控制和稳定系统所需的特殊比例-积分-微分(PID)软件例程。这个例程必须根据来自ADC的反馈电压提供合适的反馈信号来实现稳定性能。另外,这个例程必须将这个反馈信号与自己内部的数字参数进行比较,并输出理想的电流设置给产生比较器参考信号的DAC(图3)。
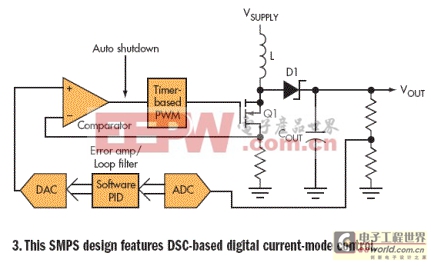
这个SMPS设计采用的是基于DSC的数字电流模式控制。
数字环路控制
SMPS设计使用DSC时需要考虑的一个关键因素是确保板上PWM模块为电源设计提供足够的分辨率。DSC的ADC要向控制环路提供状态(反馈),因此也应具有足够的分辨率。
其次,谨慎选择DSC也很重要,DSC内置的模拟比较器必须有足够快的速度匹配所产生的脉冲宽度。虽然可以用ADC替代比较器用于终止PWM脉冲,但DSC必须连续监视和处理信号。这将浪费它们的处理能力,因为被监视信号只与固定限值比较。高速模拟比较器可以解放处理器和ADC,让它们执行其它更高价值的任务,同时帮助DSC执行电源故障和限流功能。
此外,DSC中的ADC模块提供独立的采样保持电路是很有用的,能让DSC以精确的时间同时采样多个电压或电流。这样即使瞬时信号也可以被采样,并且有助于降低系统成本。如果ADC可以异步采样就更好了,因为这样能支持工作在不同频率的多个控制环路,如运行在70kHz的功率因素校正(PFC)电路和运行在250kHz的直流直流转换模块。
SMPS设计中的PID算法
利用PID算法,实际电压与理想输出电压之间的比例、积分和微分误差同时被用来控制PWM占空比。PID算法共有三种基本的形式:
1. 串行,或交互;
2. 并行,或非交互;
3. 理想的并行。
电压和电流模式控制环路中都可以部署PID算法。另外,DSC不要求复杂的DSP编程技巧,因为它们将DSP功能作为人们熟悉的MCU环境中的外设加以提供。
占空比超过50%可能会产生电流模式的稳定性问题。不过可以通过PID软件设定要求的电流等级而轻松地解决这个问题。因此很容易调整DAC值,并使得数字化方式实现斜率补偿比模拟方式要容易得多,它需要一个与PWM脉冲同步的斜坡发生器和一个将斜坡与电流反馈相加的求和点。
上述技术将生成基于经济和较低MIPS的DSC的电流模式SMPS设计,而不是基于运行在1到2BIPS的快速控制器的设计。例如,Microchip公司提供的dsPIC30F202X DSC就包含有高分辨率数字PWM发生器、200万样本每秒标称性能的ADC、与10位参考ADC相连的高速模拟比较器和一个30MIPS、具有DSP功能的控制器(图4)。

像Microchip公司的dsPIC30F202X这种较低MIPS的经济型DSC并非采用运行在1到2BIPS的快速控制器,但它能提供电流模式SMPS设计的基础。
PID控制环路是控制软件的核心(图5),它以固定时间为基础在ADC中断下运行。象电压上升/下降、误差检测、前向反馈计算和通信支持例程等系统功能应在?空闲环路?中执行,以便减轻PID控制软件中不必要的工作负担。

位于软件核心的是PID控制环路结构。
PID环路是软件
- 透过表面看本质—电源设计大揭秘(03-06)
- 选购及使用移动电源注意事项(10-05)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)