三相PWM逆变电源控制系统PID参数设计
PID控制是最早发展起来的控制策略之一,具有算法简单、易于实现、鲁棒性好且可靠性高等优点,是一种最通用的控制方法,在各种电源控制系统中得到了很好的应用。对于PID参数的确定,一般有经验的技术人员会根据以往的调试经验,直接设置控制系统的PID参数,最终通过不断调试来满足要求。没有经验的多数人选择用仿真的方法预先试出一个较为合适的PID参数,然后在此基础上不断调试。这两种方法都缺少一定的理论依据,工作量比较大,并且在系统参数变化的情况下,所选的PID参数对系统性能的影响无从得知。
虽然复杂的、非线性系统的数学模型难以确定,但是在前人所做工作的基础上,经过一定的分析和简化,最终可表示成传递函数的形式。本文将PID控制应用于PWM电源系统中,该系统的传递函数可由零点、极点和增益因子完全确定。零点和极点的含义是,当复频率取值在零点或极点上时,传递函数取零值或趋向无穷大。因此,零极点必然和频率响应密切相关。故通过零极点协调配置的方法,可以达到所期望的响应。
1 PWM逆变电源主电路结构及数学模型
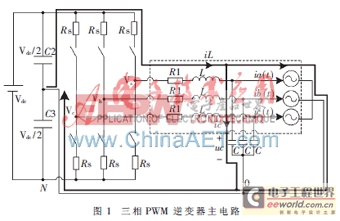
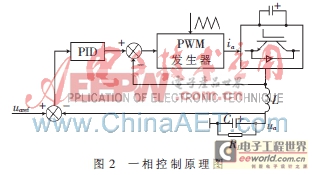
图1所示为三相PWM逆变器主电路原理图[1],Vdc为直流侧电源,C2、C3两个电容为负载提供地线,Rs为IGBT开关的等效电阻,R1和L为输出滤波电感的等效电阻和电感量,C为滤波电容,ik0表示负载电流。图1粗线所示的一相回路中,采用如图2所示的PID调节产生一相的调制波,再与三角载波比较产生PWM信号。由于三相的控制方式与此相同,因此只对一相电路分析。
主电路中功率开关管工作于“开”和“关”两种状态,桥臂中点输出电压Vdc是以Vdc/2为幅值的脉冲电压,Vk(k=a,b,c)是不连续的。工程应用中通常采用状态空间平均法处理, 选择电容电压uc、电感电流iL作为状态变量,桥臂中点电压vk(k=a,b,c)作为输入,以平均值vk代替,负载电流ik0(k=a,b,c)作为扰动输入,得到逆变器连续系统的状态方程为: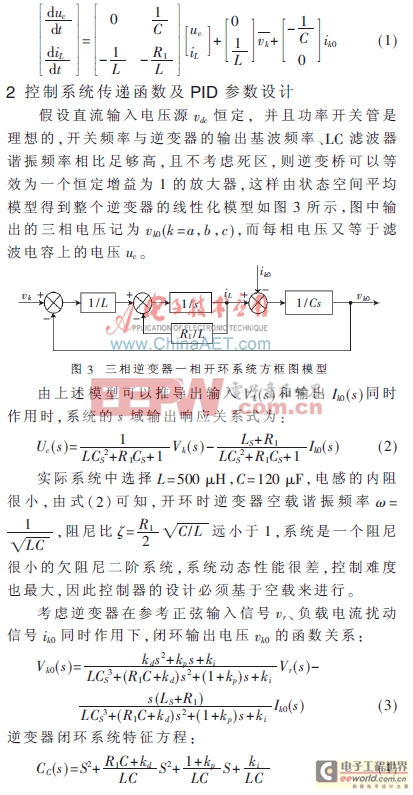
从式(4)可以看出,瞬时电压PID闭环控制系统是一个高阶系统。在控制工程实践中,考虑到控制系统既要有较高的响应速度,又要有一定的阻尼程度,还要求减少死区、摩擦等非线性因素对系统性能的影响,常常将高阶系统的增益调整到使系统具有一对闭环共扼主导极点。这时,可以用二阶系统的动态性能指标来估算高阶系统的动态性能。
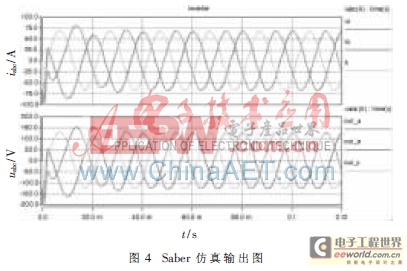
通过一系列的推导和研究,给出了三相PWM逆变电源控制系统PID参数的理论值,仿真初步验证了该参数的有效性。研究对于三相PWM逆变电源控制系统的设计具有较强的工程应用价值。
- 三相PWM电机驱动器A3936及其应用[图](12-09)
- 基于电流预测的SVPWM控制的研究(12-23)
- 中小功率光伏用逆变电源现状发展分析(12-09)
- 一款基于UC2525的交流逆变电源设计(12-08)
- 弧焊逆变电源的谐波分析和抑制(12-08)
- 逆变电源及逆变电源的原理(12-08)