智能化断路器介绍及其工作原理分析
是断路器的辅助接点状态, 经过光电隔离可以很方便地输入CPU 中,以此判断断路器的状态。
3.4 显示和键盘单元
在智能化设备中, 不仅要实现自动控制, 还要能把相关信息传递给操作运行人员, 还要能够接受外部输入并做出响应。良好的用户界面是人机对话所不可缺少的, 灵活的键盘管理及直观的信息显示给用户提供了极大的便利。通过液晶屏或发光管能够适时显示各种状态和负载的参数值及故障电流、故障类型和保护动作、试验整定情况, 结合按键还可以进行保护的整定、预警值的设定、开关的试验和各种功能的检测。
3.5 执行输出单元
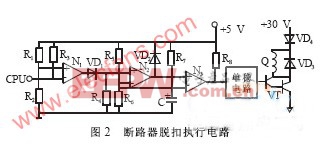
智能化断路器的执行元件为一个带永久磁铁的磁通变换器, 其特点是体积小, 功耗低, 脱扣力大。正常工作时永久磁铁使动静铁芯保持吸合。来自互感器的过载、短路、接地等故障信号, 按预先设计好的保护特性要求, 经微处理器单元处理后, 发出一定宽度的跳闸脉冲(负方波脉冲)送到磁通变换器的线圈,产生反向磁场, 抵消永久磁通, 动铁芯释放产生的机械能量推动断路器的脱扣器使断路器分断, 其脱扣执行电路如图2 所示
3.6 通信接口
智能化断路器所带的串行通信接口, 可将智能化断路器连接到现场总线, 将配电系统组成一局域网,一台计算机作为主站,若干带通讯接口的智能断路器组成从站。断路器编号、分合闸状态、各种设定值、运行电流、电压、故障电流、动作时间及故障状态等多种参数进行网络传输, 实现与系统上位管理机或控制调度中心计算机间的信息交换, 接收上位机或远方调度控制中心的数据上传要求, 完成对现场设备的远方监控和遥测、遥讯、遥调、遥控功能。
3.7 电源
智能化断路器采用双电源供电方式, 只要其中任何一路电源正常工作, 均可可靠地给多功能脱扣器供电。一路电源为自生电源, 用速饱和铁芯电流互感器从主电路感应获得电源。另一路电源为辅助电源, 以“或”的方式由外部提供,它不仅在主电源不能工作时提供电源, 还可在主电路停电或断路器投入运行前对控制器进行参数整定、功能检查、试验、状态显示、通信以及在断路器故障分断后能保持各种状态指示及故障检查, 以维持其正常工作和各种显示。
4 智能脱扣器的软件设计
软件设计主要分为两个部分, 主程序和中断程序。主程序包括故障处理、键盘处理、显示处理、通信处理等子程序; 中断程序包括定时器中断、键盘中断、通讯中断等。
单片机对工频电流信号进行采样, 利用一种基于小波分析和FFT 的改进算法计算电流的有效值,可以提高采样的精度, 满足系统对延时保护高精度的要求。小波算法在采样过程中检测到可疑信号点后, 由FFT 算法进行有效值判断, 如果没有超过门槛值, 则可疑信号点无效, 回到小波算法中继续寻找采样可疑点; 如果有效值超过门槛值, 则认为可疑点有效, 根据各保护条件输出相应信号。
多功能脱扣器实时控制采用定时器中断方式,判断瞬时故障为最优先中断; 判断短延时、长延时和接地故障为次优先级中断, 按键操作为低级中断。每一相电流依次采样, 分别与前一次保存的数据比较, 保存较大的数据。接着计算出最大相电流,与瞬时整定电流值比较, 判断是否瞬时故障。按键闭合时产生中断请求, I/0 响应中断, 执行中断服务程序扫描按键, 判别键盘上闭合键的键号并作出相应的处理。这时还需排除键抖动引起的误操作, 以及避免对同一个键的一次闭合作多重处理的错误, 采用双键封锁的键盘工作方式来排除上述误操作, 在去抖动周期内有两个键按下, 则认为是同时按下, 只有最后释放的那个键作闭合处理。根根计算出的键号,执行相应的程序, 实现脱扣器的各种操作保护功能。
5 抗干扰措施
由于断路器工作在较为恶劣的电磁环境中, 强干扰会使系统监控程序失控, 脱离正常的执行顺序,甚至发出错误的控制信号, 造成断路器的误动作。因此脱扣器的抗干扰性能在很大程度上决定了断路器能否正常工作和其动作的准确性与可靠性。为了保证系统工作可靠性, 智能化断路器常采用软、硬件相结合的抗干扰技术。在硬件设计中采用电源滤波技术、屏蔽技术、隔离技术、接地技术、合理布线、贴片封装、并做好防潮和绝缘、硬件看门狗等措施; 在软件设计上采用数字滤波技术、软件陷阱、空指令、对称检测法、限幅检测法、小波分析和FFT 的改进算法、软件看门狗等技术, 从而保证了智能断路器的可靠、准确分合闸, 避免了因系统自身故障而引起的不能开断或误动作的情况发生。
6 保护的设置
智能化断路器为了满足现场实际的需要, 设置了过载长延时、短路短延时、短路瞬时和接地等四段保护功能。其中瞬时保护是一种特殊的保护方式, 为了提
- 简述数字电位器基本原理与基本特性(12-09)
- 工程师福利:倾情奉献无线充电器设计原理及BOM清单(12-09)
- 集中器侧硬件原理图设计(12-09)
- 开关电源原理与设计主要器件之开关电源变压器(12-09)
- 变频器工作原理及控制方式介绍(12-08)
- 小型UPS电源的原理与维护(12-08)