基于分类算法的双三相感应电机SVPWM
摘要:传统的SVPWM算法,因其涉及较多的扇区判断、三角函数计算和平方根运算,其算法较为复杂。在此首先分析了基于分类算法的SVPWM的基本原理及其在计算效率上的优势。针对双三相感应电机控制的特点,提出基于分类算法的六相逆变器SVPWM控制算法,并进行了实验验证。实验结果验证了该控制算法的有效性。
关键词:感应电机;双三相;分类算法;数字信号处理器
1 引言
多相感应电机交流调速系统具有可靠性高、转矩脉动小、同等电压下功率更大等优点,是大功率交流变频调速的发展方向之一。双三相感应电机控制系统为其典型代表。传统的双三相感应电机SVPWM算法,因涉及较多的扇区判断、三角函数计算和平方根运算,其计算与实现较为复杂。为此,国内外学者研究了大量改进算法。其中,基于人工神经网络的分类算法已经应用在控制系统中,并且取得了较好的效果。其思想是按照预先指定的分类标准,将输入信号通过固定的训练模式进行分类、比较,最终得到较理想的输出特性。
此处首先分析了分类算法的SVPWM原理。其次,采用基于分类算法的SVPWM控制算法,搭建了六相逆变器的SVPWM模型,并对其进行了基于DSP的实验验证。
2 基于分类算法的SVPWM原理
传统的三相VSR电压的作用方式及合成原理如图1所示。
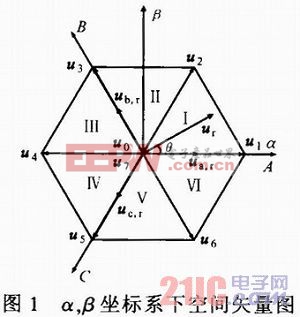
定义调制度为:![]()
式中:‖ur‖为参考相电压幅值;Udc为逆变器直流母线电压。
传统的SVPWM算法较为复杂。分类算法的思想是按照一定的分类标准,将输入参考信号通过固定的训练模式进行分类和比较,并得到较理想的输出特性。由于所有进行分类的网络权值都已知,因此无需对其进行训练。
比较网络训练完成后,在输入层输入标幺化的输入参考电压矢量,则该网络中间节点的值为:
net=U·W=‖U‖W‖cosθ (2)
由于输入矢量和权值矢量均为标幺化,中间节点的值可由上述两个矢量夹角的余弦决定。赢得比较的矢量是最靠近输入矢量的,即比较结果最大的那个中间节点会赢得比较。
与传统的SVPWM相比,基于分类算法的SVPWM算法简单、精确。参考电压矢量经过6个线性单元计算后,其结果被送入比较网络进行处
理。其中第k个计算单元为:
nk=‖ur‖‖uk‖cos(∠ur,uk),k=1,2…6 (3)
通过判断计算比较单元的两个最大输出值ni与ni+1,即可确定出用来合成参考电压矢量的基矢量ui与ui+1。式(3)计算ni的方法是非线性的,实际应用中一般采用文献的方法进行线性化处理。综上所述,可得基于分类算法的SVPWM原理框图如图2所示。

针对双绕组的中性点不连接的双三相电机所需的六相逆变器,将其分成两个独立切换的三相逆变器,并将开关矢量映射到逆变器的拓扑结构中,如图3所示。
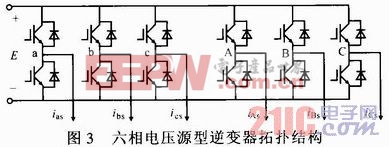
这样将简化选择开关矢量和计算作用时间。从这一角度出发,六相逆变器SVPWM控制就是要合成两个幅值相同,相位相差30°的参考矢量。此时,可将同一个参考矢量应用到两个调制器中,只要将一个调制器的开关矢量顺时针移30°,即可用到另一个调制器中,如图4所示。由图中的两个六边形可以看出,ABC绕组的矢量图与abc绕组的矢量图并不相同。故在一个开关周期内,两个绕组的开关矢量选择和作用时间也不同。通过分类算法的SVPWM可使ABC绕组运行在过调制区域,同样可对abc绕组作类似控制。

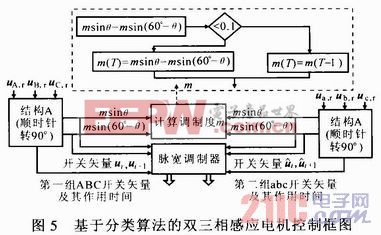
结合上述分析,可得基于分类算法的双三相感应电机SVPWM控制框图如图5所示。
使用TMS320F2812型DSP实现所提出的双三相SVPWM方法,图6示出实验波形。

开关频率5 kHz,电机额定功率3 kW,额定频率50 Hz,额定转速970 r·min-1。图6a,b为CCS环境下观察的相电压调制波波形与电机转子角度,图6c为双三相电机线电压和电流波形。由实验结果可见,所提出的基于分类算法双三相电机SVPWM可使电机运行较为平稳。
5 结论
此处首先分析了分类算法的SVPWM原理。其次,采用了基于分类算法的SVPWM控制算法,搭建了六相逆变器的SVPWM模型,并对其进行了基于DSP的实验验证。实验结果证明了所使用多相电机分类算法SVPWM的有效性,其方法还可进一步扩展到更多相数的多相电机中。
- 高压大电流达林顿晶体管阵列系列产品(ULN2003A)及其应用(06-19)
- 自动跟踪太阳光伏发电设备控制器的设计(06-22)
- 两款直流电机功率驱动芯片及其应用(08-05)
- 基于CS5460A芯片的电网电流表设计(11-12)
- 更严格的法规及日益增加的消费者期望 对白家电行业提出电机驱动新挑战(03-21)
- 电源、电机驱动及分立元件在汽车自动空调的应用(12-09)