如何深入分析电源电路技巧:驾驭噪声电
结合,后患无穷。在布局过程中,您必须最小化节点长度,并尽可能近地将反馈和输入组件靠近误差放大器放置。如果反馈网络中存在高频积分电容,那么您必须将其靠近放大器放置,其他反馈组件紧跟其后。并且,串联电阻-电容也可能形成补偿网络。最理想的结果是,将电阻靠近误差放大器输入端放置,这样,如果高频信号注入该电阻-电容节点时,那么该高频信号就不得不承受较高的电阻阻抗—而电容对高频信号的阻抗则很校
斜坡是另一个潜在的会带来噪声问题的地方。斜坡通常由电容器充电(电压模式)生成,或由来自于电源开关电流的采样(电流模式)生成。通常,电压模式斜坡并不是一个问题,因为电容对高频注入信号的阻抗很小。而电流斜坡却较为棘手,因为存在了上升边沿峰值、相对较小的斜坡振幅以及功率级寄生效应。

图 2 显示了电流斜坡存在的一些问题。第一幅图显示了上升边沿峰值和随后产生的电流斜坡。比较器(根据其不同速度)具有两个电压结点 (potential trip points),结果是无序控制运行,听起来更像是煎熏肉的声音。
利用控制 IC 中的上升边沿消隐可以很好地解决这一问题,其忽略了电流波形的最初部分。波形的高频滤波也有助于解决该问题。同样也要将电容器尽可能近地靠近控制 IC 放置。正如这两种波形表现出来的那样,另一种常见的问题是次谐波振荡。这种宽-窄驱动波形表现为非充分斜率补偿。向当前斜坡增加更多的电压斜坡便可以解决该问题。
尽管您已经相当仔细地设计了电源布局,但是您的原型电源还是存在噪声。这该怎么办呢?首先,您要确定消除不稳定因素的环路响应不存在问题。有趣的是,噪声问题可能会看起来像是电源交叉频率上的不稳定。但真正的情况是该环路正以其最快响应速度纠出注入误差。同样,最佳方法是识别出噪声正被注入下列三个地方之一:误差放大器、参考电压或斜坡。您只需分步解决便可!
第一步是检查节点,看斜坡中是否存在明显的非线性,或者误差放大器输出中是否存在高频率变化。如果检查后没有发现任何问题,那么就将误差放大器从电路中取出,并用一个清洁的电压源加以代替。这样您应该就能够改变该电压源的输出,以平稳地改变电源输出。如果这样做奏效的话,那么您就已经将问题范围缩小至参考电压和误差放大器了。
有时,控制 IC 中的参考电压易受开关波形的影响。利用添加更多(或适当)的旁路可能会使这种状况得到改善。另外,使用栅极驱动电阻来减缓开关波形也可能会有助于解决这一问题。如果问题出在误差放大器上,那么降低补偿组件阻抗会有所帮助,因为这样降低了注入信号的振幅。如果所有这些方法都不奏效,那么就从印刷电路板将误差放大器节点去除。对补偿组件进行架空布线 (air wiring) 可以帮助我们识别出哪里有问题。
3:阻尼输入滤波器
开关调节器通常优于线性调节器,因为它们更高效,而开关拓扑结构则十分依赖输入滤波器。这种电路元件与电源的典型负动态阻 抗相结合,可以诱发振荡问题。本文将阐述如何避免此类问题的出现。
一般而言,所有的电源都在一个给定输入范围保持其效率。因此,输入功率或多或少地与输入电压水平保持恒定。图 1 显示的是一个开关电源的特征。随着电压的下降,电流不断上升。
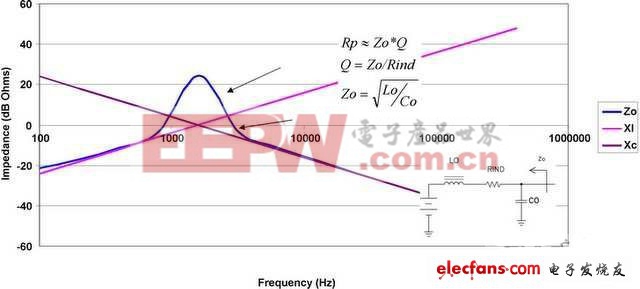
图 1 开关电源表现出的负阻抗
负输入阻抗
电压-电流线呈现出一定的斜率,其从本质上定义了电源的动态阻抗。这根线的斜率等于负输入电压除以输入电流。也就是说,由 Pin = V ? I,可以得出 V = Pin/I;并由此可得 dV/dI = –Pin/I2 或 dV/dI ≈ –V/I。
该近似值有些过于简单,因为控制环路影响了输入阻抗的频率响应。但是很多时候,当涉及电流模式控制时这种简单近似值就已足够了。
为什么需要输入滤波器
开关调节器输入电流为非连续电流,并且在输入电流得不到滤波的情况下其会中断系统的运行。大多数电源系统都集成了一个如图 2 所示类型的滤波器。电容为功率级的开关电流提供了一个低阻抗,而电感则为电容上的纹波电压提供了一个高阻抗。该滤波器的高阻抗使流入源极的开关电流最小化。在低频率时,该滤波器的源极阻抗等于电感阻抗。在您升高频率的同时,电感阻抗也随之增加。在极高频率时,输出电容分流阻抗。在中间频率时,电感和电容实质上就形成了一种并联谐振电路,从而使电源阻抗变高,呈现出较高的电阻。
大多数情况下,峰值电源阻抗可以通过首先确定滤波器 (Zo) 的特性阻抗来估算得出,而滤波器特性阻抗等于电感除以电容所得值的平方根。这就是谐振下电感或者电容的阻抗。
接下来,对电容的等效串联电阻 (ESR) 和电感的电
- 家用开关电源电路图详细图解(12-09)
- 开关电源电路图详解(12-09)
- 一款12V的单片开关稳压电源电路设计(12-09)
- 电源电路设计中常用测试仿真软件(12-09)
- 基于PIC单片机的逆变电源电路设计(12-08)
- 一款多功能逆变电源的设计与实现(12-08)