高频开关电源的分段线性PID
时间:03-01
来源:互联网
点击:
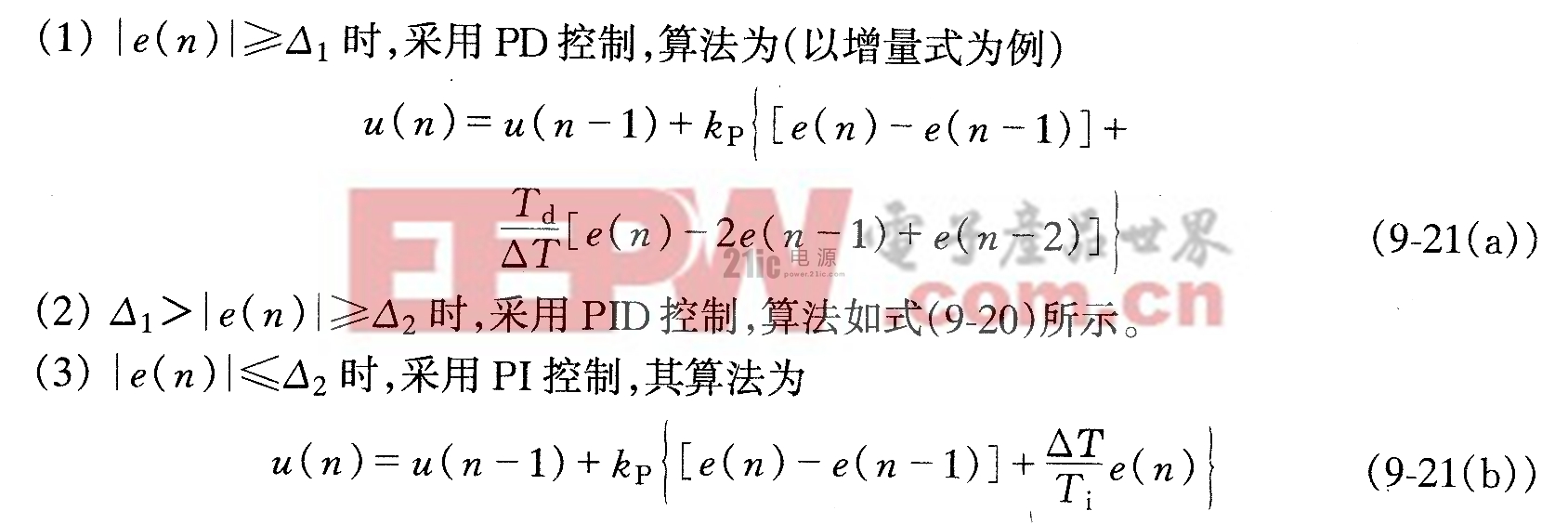
由于积分是滞后校正环节,而微分是超前校正环节,因此在控制误差e(n)较大时,应采用比例一微分(PD)调节(不用积分),这样可以改善系统的响应快速性;而在控制误差c(m)较小时,则应采用比例一积分(PI)调节(不用微分),这样可以使系统具有较好的稳定性,避免振荡。
为此,设置了两个误差限△1和△2,并且△1>△2分段线性PID算法可以描述为:
变参数PID
所谓变参数PID,是指根据被控对象(开关电源)的各种不同的运行工况,如空载和满载、输入电压高或低等,采用不同的比例系数TP、积分时间常数Ti和微分时间常数Td,使系统的控制特性在各种情况下都能保持最优。
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)