离子推进系统电源研究
和大功率输出的功率变换应用。屏栅电源的高电压输出由功率变压器的4个次级绕组串联输出,这样可以有效降低输出整流二极管的耐压要求,并且提高电源的效率。由于高耐压的二极臂具有较大的正向压降,例如二极管的耐压高于1 000 V时,它的正向压降达到3 V多,因此比一般的二极管的功耗高出3倍多。应用4个次级绕组串联输出,相对1 000 V的高压输出,每个整流电路中的二极管的耐压只要大于200 V即可满足使用要求。 简化的正激功率变换电路示意图见4图所示。推挽或半桥变换器需要两个开关管,全桥变换器需要4个开关管,相比较正激功率变换只需要一个开关管。正激变换的开关频率选择为80 kHz,尽可能减轻产品重量。电源的设计选择了电流型控制PWM,以取得更好的稳定性和过流保护性能,试验电路使用了商业级的PWM控制器,其性能参数与飞行器件一致。 加速电源同样选择了电漉型PWM控制器和铁氧体罐形磁芯。此外,加速电源还要求能提供100~500 mA的启动及故障恢复时的瞬态电流。这种状态主要是由于推力器在点火引出束流及故障恢复过程中出现的电子反流产生的较大电流。加速电源可以通过大容量的输出电容提供这种瞬态大电流的输出要求。
屏栅电源的开关频率设计为40 kHz,因为在电路试验中得到更高的开关频率将产生很大的开关损耗,较低的开关频率还能使高压功率变压器产生的寄生参数的影响最小化。
全桥功率变换拓扑由脉宽调制器(PWM)控制场效应晶体管MOSFET1~MOSFET4。屏栅电源的稳压反馈控制电路必须要求与高压输出端具有较高的隔离耐压,因此反馈采样电路由功率变压器的辅助绕组取样,再送入PWM进行比较,实现电源输出电压的稳压控制。
屏栅电源的功率变压器选择环形的铁氧体磁性材料,变压器的初级绕组使用多股漆包线缠绕以降低高频电流的趋附效应,变压器的4个次级绕组的每一个绕组单独绕制一层以减小层间的寄生电容。
2.2 阳极电源、触持极电源及加热电源设计
阳极电源与屏栅电源的输出正线合并,输出为同一端。阳极电源的输出功率虽然比屏栅电源的小,但它对提高整机效率仍有重要的作用。阳极电源的输出功率为100 W左右,根据该变换功率的大小和电路简单的设计要求,选择正激功率变换拓扑。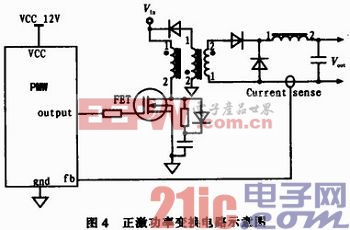
阳极电源的功率变压器、输入电感、输出电感都使用铁氧体罐形磁芯,这种磁芯具有较好的高频特性和较低的磁芯损耗。罐形磁芯还可以提供很好的集中磁场,及容易绕制和良好的散热特点。与之前的设计相比在减小了输出滤波电感的尺寸后,其输出电流纹波也改善了很多。
触持极电源和加热电源的输出功率虽然比阳极电源小,但由于输出特性相近,其控制方式均为稳流源,为了整体设计的简化,因此也选择了正激功率变压器拓扑。中和器触持极电源为中和器的触持极到阴极提供一个电子通路,以维持中和器放电,并且中和由放电室引出的氙离子束,使其成为不带电的中性氙原子。触持极电源和加热电源采用了与阳极电源一样的PWM控制器和变压器、电感器磁芯。
2.3 加速电源设计
加速电源正常工作时输出电流只有10 mA左右,但它的输出电压较高,为150~180 V。因此,针对加速电源的输出功率小、高电压输出特性及电路简单原则,选择了反激功率变换拓扑。反激功率变换电路示意图见图5所示。同正激变换器一样,反激变换器也只有一个开关管,并且由于反激变换器的功率变压器具有储能作用,减少了一个输出滤波电感器。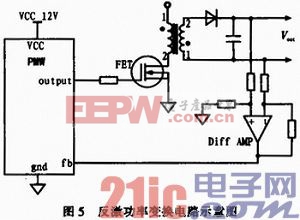
加速电源为稳压控制方式,稳压反馈控制电路是在电源的输出端取样电压信号,通过微分放大器比较输出控制信号,反馈到PWM控制器,调整输出电压,保证电压的稳定性。
2.4 遥测电路设计
电源处理单元包括数十个功能电源,其工作状态与电推进系统的工作性能直接相关,从系统性能要求出发,希望得到每个电源的输出电压和电流的模拟遥测值,从而可以在航天器在轨飞行中知道每个各电源的工作参数,进一步得到推力器在轨工作性能。
但是如果要得到每个电源的模拟遥测值,会使产品的设计复杂并且带来体积和重量的增加。所以在实验电路的设计中根据系统的基本要求,模拟遥测输出只设计了屏栅电源的输出电压和电流遥测电路,通过这两路遥测值可以计算得到推力器工作时的推力和比冲。其它必要的遥测为判断推力器是否正常工作的量,其中包括阳极电源和中和器触持极电源的电流遥测,这些遥测量只提供状态判断作用,以表明电源的输出电流值是否超出预定的设定值,用以判断电源工作是否正常。
屏栅电源的模拟遥测量电路设计,通过隔离变压器取样输出电压,经过整流滤波得到0~5 V的电压输出,电流遥测通过电流霍尔传感器取样输出电流,得到遥测电压值。电压遥测和电流遥测值都将通过给定的转换公式,计算得到输出电压和电流值,该计算值与真实值间的误差不大于2%。
阳极单元和中和器触持极电源的电流状态遥测量,可以通过线性度较差的电流互感器取样输出电流信号,经过整流滤波后得到电压信号,该信号被送入控制单元,与预先设定的值进行比较,若低于设定值,表明电源输出电流降低,处于故障状态,此时控制单元将根据设定的程序对电推进系统进行相应的处理控制。
3 电路测试及结果
对电源处理单元实验电路的性能参数主要测试了电源效率和输出电压或电流的稳定度。通过对实验电路的测试得到,所有电源的稳定度,包括负载稳定度和线性稳定度均小于5%。电源的效率都是在输入电压为100 V下测试的,图6、图7给出了主要的屏栅电源和阳极电源效率测试曲线。屏栅电源测试了在不同输出电流下的效率,阳极电源测试了3个输出电流在不同的输出负载电阻下的效率。测试结果表明,当屏栅电源输出电流为0.9 A时效率最高,达到了93.3%,而当输出电流再增大时,效率将减低。阳极电源在输出电流为4 A,负载电阻为8 Ω时效率最高达到89%,当输出电流为5 A时,电路中损耗变大,电源的效率均较低。此外,加速电源是在输出电流为12 mA下测试,其效率只有20%。最终,电源处理单元在输出功率为1 kW时,电源的总效率为90%。
- 基于嵌入式的SoC验证效率测试方案(01-08)
- 开关电源的最大效率验证和检定(10-12)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)