基于多线阵CCDS相机的大幅面扫描仪高精度实时拼接实现新方法
S-WRITE一1=ADDRESS一1+(H2一H1)·L+H2一H1,相机2写初始地址ADDRESS-WRITE一2=ADDREsS一2+H2·L+H2,相机3写初始地址ADDRESS-Wr{ITE_3=ADDRESS_3.相机1读初始地址ADDRESS-READ一1=ADDRESS一1+(H1+H2)·L+H1+H2,相机2读初始地址ADDRESS-READ_2=ADDRESS_2+H2·L+W1+H2,相机3读初始地址ADDRESS-READ_3=ADDRESS._3+W2.
针对图2(b)的情况,需缓存BUFFER-LINE=HI+H2+l行数据,相机1连续写入H1+H2+1行数据后需对写入地址初始化,相机2连续写入H2+l行数据后需对写人地址初始化。相机1写初始地址ADDRESS-WRITE一1=ADDRESS一1,相机2写初始地址ADDRESS-WrtlTE_2=ADDRESS_2+H1·L+H1,相机3写初始地址ADDRKSS_WRrI'E_3=ADDRESS_3+(H1+H2)·L+H1+H2.相机1读初始地址ADDRESS-READ一1=ADDRESS一1,相机2读初始地址ADDRESS-READ一2=ADDRESS一2+H1·L+W1+Hl,相机3读初始地址ADDRESS-READ一3=ADDRESS 3+(Hl+H2)·L+Hl+H2+W2.
针对图2(c)的情况,需缓存BUFFER-LINE=H2+1行数据,相机1连续写入H1+1行数据后需对写入地址初始化,相机3连续写人H2+1行数据后需对写入地址初始化。相机1写初始地址ADDRESS-WRITE一1=ADDRESS一1+(H2一H1)·L+H2一H1,相机2写初始地址ADDRESS-WRITE一2=ADDRESS一2+H2·L+H2,相机3写初始地址ADDRESS-WRITE_3=ADDRESS一3.相机1读初始地址ADDRESS_READ一1=ADDRESs一1+(H2一H1)·L+H2一H1,相机2读初始地址ADDRESS-READ一2=ADDRESS一2+I-12·L+w1+H2,相机3读初始地址ADDRESS_READ_3=ADDRESS_3+W2.
针对图2(d)的情况,需缓存BUFFER-LINE=Hl+1行数据,相机l连续写入Hl+l行数据后需对写入地址初始化,相机3连续写人H2+1行数据后需对写入地址初始化。相机1写初始地址ADDRESS-WRITE一1=ADDRESS一1,相机2写初始地址ADDRESS-WRITE一2=ADDRESS一2+H1·L+W1+HI,相机3写初始地址ADDRESS-WRITE一3=ADDRESS._3+(H1一H2)·L+HI-H2.相机1读初始地址ADDRESS-READ一1=ADDRESS一1,相机2读初始地址ADDRESS-READ一2=ADDRESS一2+Hl·L+W1+H1,相机3读初始地址ADDRESS-READ一3=ADDRESS_3+(H1一H2)·L+H1一H2+W2.
针对图2(e)的情况,需缓存BUFFER-LINE=H2+1行数据,相机1连续写入H2一HI+1行数据后需对写入地址初始化,相机2连续写入H2+1行数据后需对写入地址初始化。相机1写初始地址ADDRESS-WRITE一1=ADDRESS一1+H1·L+H1,相机2写初始地址ADDRESS-WRITE一2=ADDRESS一2,相机3写初始地址ADDRESS-WRITE-3=ADDRESS一3+H2·L+H2.相机1读初始地址ADDRESS-READ一1=ADDRESS一1+HI·L+H1,相机2读初始地址ADDRESS-rtE,~D._2=ADDRESS_2+Wl,相机3读初始地址ADDRESS-r{EAD_3=ADDRESS_3+H2·L+H2+W2.
针对图2(f)的情况,需缓存BUFFER-LINE=H1+l行数据,相机2连续写入H1+1行数据后需对写入地址初始化,相机3连续写入H1一H2+1行数据后需对写入地址初始化。相机1写初始地址ADDRESS-WRITE一1=ADDRESS一1+H1·L+H1,相机2写初始地址ADDRESS-WRITE一2=ADDRESS一2,相机3写初始地址ADDRESS_WRITE_3=ADDRESS_3+H2·L+H2.相机1读初始地址ADDRESS-READ一1=ADDRESS一1+H1·L+H1,相机2读初始地址ADDRESS-READ_2=ADDRESS_2+W1,相机3读初始地址ADDRESS-READ一3=ADDRESS一3+H2·L+H2+W2.
2实验结果与讨论
2.1方法执行过程
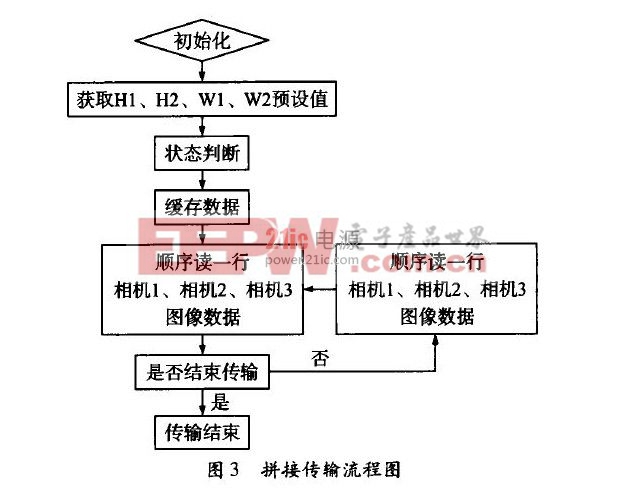
多线阵CCDS相机的大幅面扫描仪高精度实时拼接实现新方法流程如图3所示。根据主要器件的特性,上电后需对FPGA、SDRAM初始化,使其处于正常工作状态。从上位机获取H1、H2、W1、W2的预设值,判别相机位置处于何种情况。定义H1最高位为1时,相机l水平位置高于相机2水平位置,H1最高位位为0时,相机1水平位置低于相机2水平位置。定义I-12最高位为1时,相机2水平位置高于相机3水平位置,H2最高位为0时,相机2水平位置低于相机3水平位置。图2所示6种情况分对应H1、H2预设值的6种状态。H1最高位为1,H2最高位为l时对应图2(a);H1最高位为0,H2最高位为0时对应图2(b);HI最高位为0,I-12最高位为1,且Hl小于I-12时对应图2(c);H1最高位为0,H2最高位为l,且H1大于等于H2时对应图2(d);H1最高位为l,H2最高位为0,且H1小于H2时对应图2(e),Hl最高位为1,H2最高位0,且Hl大于等于H2时对应图2(f)。获取预设值后就进行数据缓存,按照相机编号逐行读出图像数据,判断读地址是否需要初始化,按照相机编号逐行写人图像数据,判断写地址是否需要初始化,最后判断是否接收到上位机发出的结束信号。
2.2
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)