光伏离网逆变器的设计
电压最低(10.5V)而输出直流电压最高(230V)的时候,最小占空比Dmin发生在输入直流电压最高(13.5V)而输出直流电压最低(160V)的时候,则根据电流临界连续条件求得电感L=1mH。
SPWM逆变器工作原理
逆变器是用来实现DC-AC变换的电力电子设备。和所有其它类型的电力电子装置一样,逆变器利用一组电力电子开关来实现电能形式的转换。由图6可见,当开关T5、T8导通,开关T6、T7关断时,输出端可以获得正极性的瞬时电压;而当开关T5、T8导通,开关T6、T7关断时,输出端可以获得负极性的瞬时电压。以一定的频率切换两组开关导通的状态,即可实现由直流电压到交流电压的变换。无论是任何具体形式的逆变器,或是其它类型的电力电子变换器,其实现电能变换的基本手段都是通过这种对电子开关的快速通断控制来改变电压(或电流)的极性(瞬时的或平均的)和幅值(平均的)。
简单地按照图6的方法控制,只能获得方波型交流电压输出,其谐波含量很大,幅值也无法调节。如果要获得理想的输出电压,只需对开关过程进行控制,PWM技术可以解决这个问题。
蓄电池充放电及MPPT电路设计
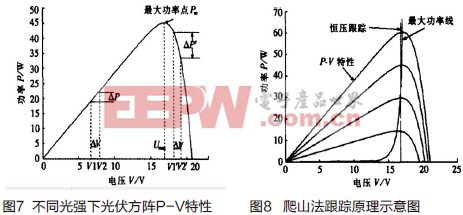
智能充放电器采用升降压拓扑结构,并用dsPIC单片机进行智能控制,从而完成太阳能电池板最大功率跟踪。所谓最大功率点跟踪,即是指控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最高的效率对蓄电池充电,本系统采用爬山算法实现。爬山法是通过将本次光伏方阵的输出功率和上次的相比较来确定增加或减少光伏方阵工作电压来实现MPPT。如图7,若ΔP>0,说明电池板工作于上坡段,即最大功率点Pm的左侧,需继续增大工作电压,从左边向最大功率点靠近;若ΔP<0,减小工作电压,从右边向最大功率点靠近;若ΔP=0,电池板工作于最大功率点附近,于是工作电压在光强变化之前时保持不变。
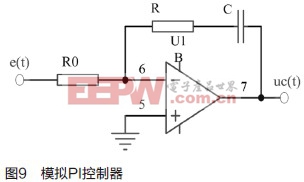
如图8,在最大功率点的左侧时,光强由上一时刻的S1减小为当前时刻的S2,按照爬山算法的原理,可知此时ω2-ω1=ΔP<0,认为电池板工作于最大功率点Pm的右侧,工作电压被减小,而实际上电池板处于上坡段,工作电压应该增大才能向最大功率点靠近。同理,在最大功率点的右侧时,也有类似的情况出现,这就是爬山法在光强变化时的误动作,爬山改进法就是为解决这个问题提出的。
爬山改进法增加下一时刻的电压V3对应的功率W3参与判断。如图8,当ΔP>0时,如果W23,说明是光强变化引起的功率变化,应保持原来的工作电压不变,否则,说明电池板工作于最大功率点的左侧,需增加工作电压;同样,当ΔP<0时,如果W2>W3,应保持原来的工作电压不变,否则需减小工作电压。爬山改进法避免了爬山法跟踪的误动作,有利于提高最大功率跟踪的效率。
软件设计和测试结果
根据前面分析讨论,研制一套基于Microchip公司的PIC芯片dsPIC30F4011的500W光伏离网发电装置,由于此单片机拥有强大的控制能力和数据处理能力,使整机硬件结构较为简单,除了主电路、取样检测电路和驱动电路外,所有的运算、数据处理均由DSP完成。因此合理有效的控制策略和简洁软件构架是该系统可靠运行的有力保证。根据前面的分析和光伏离网发电系统的基本要求,DSP应该完成最大功率点跟踪控制、独立供电运行控制及相应的其它保护。对于一个逆变电源来讲,当输入电压或输出负载发生变化时,逆变电源的输出基波电源会发生变化,为了稳定输出的电压,则要调整参考正弦波的幅度。为了在危机条件变化时能够自动稳压,必然要引入闭环控制。逆变器的控制方法有很多种,比如输出电压平均值反馈控制、瞬时值反馈控制、以及输出电压电流双闭环控制等,随着控制芯片的性能提升,一些现代控制理论也在逆变电源中获得应用。
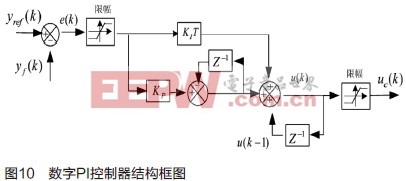
在本设计中采用输出电压平均值反馈控制方案,控制器采用常用的PI控制器,其输入为给定值和反馈值的差值,输出为脉冲宽度控制比例。整个系统的控制过程为:如果反馈值和给定值不一致,比较如反馈值比给定值小,控制器就会根据输入的误差适当的调高输出,即增大输出脉冲的宽度,从而使得输出基波的电压增大,达到稳压的效果。数字PI控制器的模型可由模拟PI控制器导出。

对频域传函进行离散化的方法有向后差分法,向前差分法以及双线性变换法等,通常向后差分法。

上式即为编写数字PI程序的递推关系式。图10为数字PI控制器的结构框图。
本设计中电压反馈环节PI控制器的子程序流程图如图11,流程图中变量名定义如下:
电压给定:Vref
电压反馈:Vf
输出电压:Vout
前一拍的误差量:e(k-1)
当前拍的误差量:e(k)
前一拍的控制器输出控制量: Uc(k-1)
当前拍的控制器输出控制量:Uc(k)
光伏 逆变器 PI调节器 MPPT 太阳能 201311 相关文章:
- 一种应用于光伏系统的双模式MPPT控制方法研究(12-28)
- 三种常见的光伏接线盒介绍(12-09)
- 集中式光伏逆变器和组串式逆变器选型之比较(12-09)
- 四种思路 四大光伏逆变器并网方式(12-09)
- 光伏并网逆变器参数、特性、分类和发展趋势(12-09)
- 太阳能光伏逆变器选用需遵循正确方法(12-09)