电力变压器工作原理及保护
,在确认工作开关跳开后,再合上备用电源。母线断电时间至少为备用开关合闸时间。此种方式多用于事故切换。
? 同时切换。这种方式介于并联切换和串联切换之间。合备用命令在跳工作命令发出之后、工作开关跳开之前发出。母线断电时间大于0ms而小于备用开关合闸时间,可设置延时来调整。这种方式既可用于正常切换,也可用于事故切换。
(2)按起动原因分类:
? 正常手动切换。由运行人员手动操作起动,快切装置按事先设定的手动切换方式(并联、同时)进行分合闸操作。
? 事故自动切换。由保护接点起动。发变组、厂变和其它保护出口跳工作电源开关的同时,起动快切装置进行切换,快切装置按事先设定的自动切换方式(串联、同时)进行分合闸操作。
? 不正常情况自动切换。有两种不正常情况,一是母线失压。母线电压低于整定电压达整定延时后,装置起动,并按自动方式进行切换。二是工作电源开关误跳,由工作开关辅助接点起动装置,在切换条件满足时合上备用电源。
(3)按切换速度分类:
? 快速切换
? 短延时切换
? 同期捕捉切换
? 残压切换
3、快速切换、同期捕捉切换、残压切换原理
(1)快速切换
图1所示为某电厂厂用电系统,工作电源由发电机端经厂用高压工作变压器引入,备用电源由电厂高压母线经起动/备用变引入。正常运行时,厂用母线由工作电源供电,当工作电源侧IDL(2DL)发生故障时,必须跳开工作电源开关3DL(4DL),合5DL(6DL),跳开3DL(4DL)时厂用母线失电,由于厂用负荷多为异步电动机,电动机将惰行,母线电压为众多电动机的合成反馈电压,称其为残压,残压的频率和幅值将逐渐衰减。
图2以极坐标形式绘出的某300MW机组6KV母线残压相量变化轨迹(残压衰减较慢的情况)
图2 母线残压特性示意图

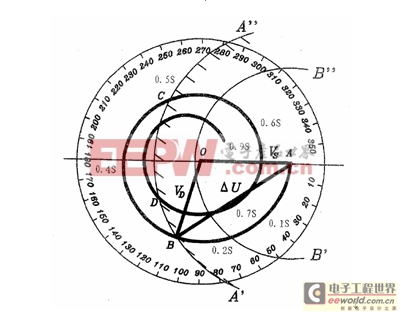
图中VD为母线残压,Vs为备用电源电压,△U为备用电源电压与母线残压间的差拍电压。合上备用电源后,电动机承受的电压UM为:
UM=XM/(Xs+XM)△U (1)
式中,XM--母线上电动机组和低压负荷折算到鬲压厂用电压后的等值电抗。
Xs--电源的等值电抗.
令K=XM/(Xs +XM),则
UM=K△U (2)
为保证电动机安全自起动,UM应小于电动机的允许起动电压,设为1.1倍额定电压UDe,则有:
K△U<1.1UDe (3)
△U(%)<1.1/K (4)
设K=0.67,则△U(%)1.64。图2中,以A为圆心,以1.64为半径绘出弧线A`-A``,则A`-A``的右侧为备用电源允许合闸的安全区域,左侧则为不安全区域,若取K=0.95,则△U(%)1.15,图2中B`-B``的左侧均为不安全区域。
假定正常运行时工作电源与备用电源同相,其电压相量端点为A,则母线失电后残压相量端点将沿残压曲线由A向B方向移动,如能在A—B段内合上备用电源,则既能保证电动机安全,又不使电动机转速下降太多,这就是所谓的“快速切换”。图2中,快速切换时间应小于0.2s,实际应用时,B点通常由相角来界定,如60°,考虑到合闸回路固有时间,合闸命令发出时的角度应小于60°,即应有一定的提前量,提前量的大小取决于频差和合闸时间,如在合闸固有时间内平均频差为1Hz,合闸时间为100ms,则提前量约为36°。
快速切换的整定值有两个,即频差和相角差,在装置发出合闸命令前瞬间将实测值与整定值进行比较,判断是否满足合闸条件。由于快速切换总是在起动后瞬间进行,因此频差和相差整定可取较小值。
(2)同期捕捉切换
同期捕捉切换。其原理概括如下:
图2中,过B点后BC段为不安全区域,不允许切换。在C点后至CD段实现的切换以前通常称为“延时切换”或“短延时切换”。前面己分析过,用固定延时的方法并不可靠。最好的办法是实时跟踪残压的频差和角差变化,尽量做到在反馈电压与备用电源电压向量第一次相位重合时合闸,这就是所谓的“同期捕捉切换”。以上图为例,同期捕捉切换时间约为0.6s,对于残压衰减较快的情况,该时间要短得多。若能实现同期捕捉切换,特别是同相点合闸,对电动机的自起动也很有利,因此时厂母电压衰减到65%一70%左右,电动机转速不至于下降很大,且备用电源合上时冲击最小。
需要说明的是,同期捕捉切换之“同期”与发电机同期并网之“同期”有很大不同,同期捕捉切换时,电动机相当于异步发电机,其定子绕组磁场已由同步磁场转为异步磁场,而转子不存在外加原动力和外加励磁电流。因此,备用电源合上时,若相角差不大,即使存在一些频差和压差,定子磁场也将很快恢复同步,电动机也很快恢复正常异步运行。所以,此处同期指在相角差零点附近一定范围内合闸(合上)。
在实现手段上,同期捕捉切换有两种基本方法:一种基于“恒定越前相角”原理,即根据正常厂用负荷下同期
- 电力变压器非电量保护装置将各种故障一扫而光(12-31)
- 对非晶电力变压器的一些思考(12-23)
- 技术知识:电力变压器故障的原因分析及维护方法(12-19)
- 变频器工作原理及控制方式介绍(12-08)
- 超级电容工作原理、特性及应用(12-07)
- 基于功率场效应管(MOSFET)的结构工作原理及应用(01-21)