基于姿态传感器温度补偿方法的研究
随着微机电系统(MEMS)技术在微型化技术基础上,结合了电子、机械、材料等多种学科交叉融合的前沿科研领域的不断发展与成熟,从而出现了很多基于MEMS技术的传感器,此类传感器具有体积小、重量轻、低功耗、多功能等优点,在电子产品、航空航天、机械化工等行业中得到了广泛应用。其中基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度变化而引起的误差,即必须对传感器进行温度补偿。
传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。硬件补偿方法主要是改变电路来达到补偿效果,但是这种方法会导致电路的复杂化,同时提高了成本。软件补偿方法主要有最小二乘法、BP 神经网络法、回归法等。从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。
1 姿态传感器的温度补偿原理
本文采用美国InvenSense 公司生产的ITG?3205 三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。
传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。姿态传感器的温度补偿原理如框图1所示。

2 姿态传感器的温度补偿方法
在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即y = mx + n 的线性关系。通过最小二乘法进行线性拟合,可以得出参数m 和n 的值。
此时可以发现,在不同的温度下,所拟合出来的m和n 值是随温度的变化而变化的。在此情况下,必须找出温度分别与m 和n 之间的关系,为此同样可以根据最小二乘法再次进行曲线拟合,从而得出m 值与温度之间的关系。同理也可以得出n 与温度之间的关系。经过两次曲线拟合之后,可以得出理论值与输出值之间的误差有了明显的减小,并且满足预期的要求。在实际应用中,为了达到高精度检测的要求,可以通过测量多组数据进行曲线拟合的方法来实现。
3 姿态传感器的实验数据处理
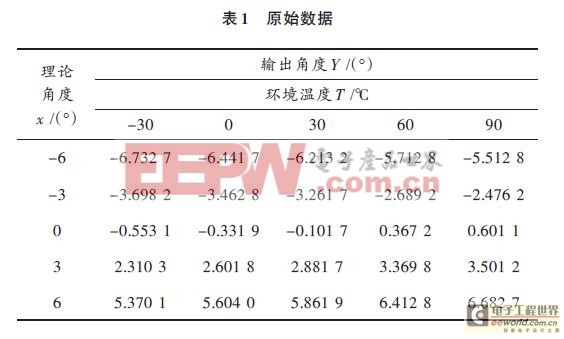
由于各轴的检测原理是相同的,因此本论文采用x轴的检测数据进行实验验证。主要的实验仪器有被测姿态传感器、经纬仪、高低恒温箱、高精度角度检测仪等。表1所得数据是未经温度补偿时的实验数据,即原始数据。
3.1 第一次线性拟合
由于按照最小二乘法的基本步骤进行拟合的计算量比较大,所以本文采用Matlab进行数据处理,这样不但可以减少复杂的计算过程,而且还可以保证较高的计算精度。
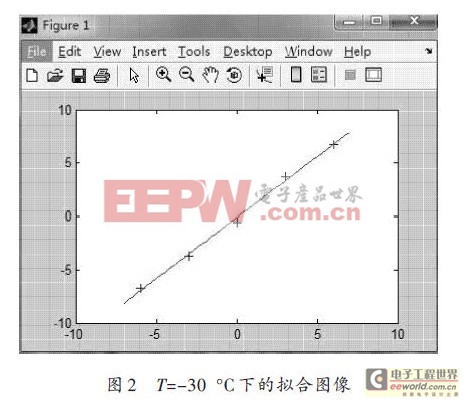
例如在温度T=-30 °C的条件下,以理论角度x 为自变量,输出角度y 为因变量,根据线性关系式y = mx + n ,计算出参数m 和n的值。具体计算程序如下:

拟合图像如下图2所示。
依次求出不同温度下参数m 和n 的值,计算结果如表2所示。

3.2 第二次曲线拟合
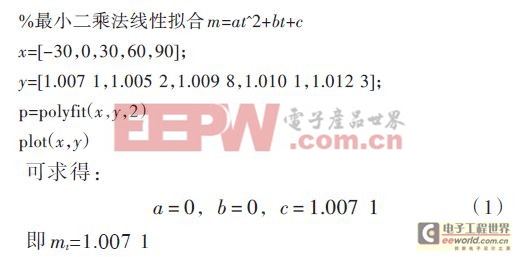
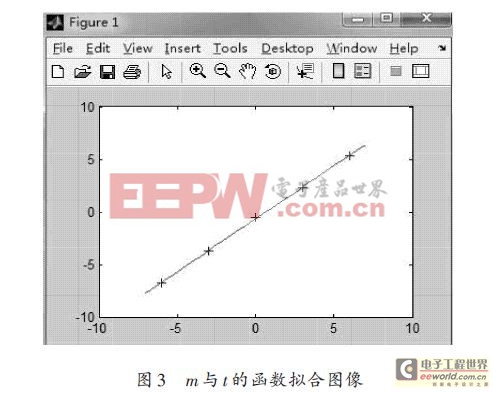
以参数m 为因变量,温度t 为自变量,根据曲线拟合式mt = at2 + bt + c ,利用Matlab 求出a,b,c 的值,最终确定m 与t 的函数关系式。同理,可求得n 与t 的函数关系式。具体计算程序如下:
拟合图像如图3所示。
同理,求得n 与t 之间的函数关系式为:
4 实验数据的验证
传感器未经温度补偿时的输出为y = mx + n ,即在t ℃时,无补偿输出为:

根据式(1)、(2)、(7)可得补偿后的输出值。偿后的数据如表3所示。在表1中未补偿前的最大误差角度为0.682 7°,表3中补偿后的最大误差角度为0.261 6°,相对减少的误差角度为0.421 1°。

5 结语
由表1和表3的数据对比结果可以看出,经过温度补偿后的姿态检测精度相比补偿前有了很大的提高。由此说明,在环境温度变化的条件下,利用最小二乘法进行温度补偿,可以达到预期的效果,因此这种方法可以运用到工程实际中。
- 一种电流温度稳定度小于1μA/℃的V/I变换器(05-27)
- 基于温度补偿的高温度高精度稳定性恒流源(12-26)
- 目前变电站蓄电池浮充电运行的问题分析与研究(12-25)
- 智能型太阳能控制器的研制(12-15)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)