一种高精度的超声波智能测距系统的设计方案
1.引言
1.1 国内外发展的概况
智能测距系统目前在国内有一定的研究水平,多用于汽车工业以及智能机器人的导航系统和相关领域。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
超声波由于指向性强、能量消耗缓慢且在介质中传播的距离较远,因而经常用于距离的测量。它主要应用于倒车雷达、测距仪、物位测量仪、移动机器人的研制、建筑施工工地以及一些工业现场等,例如:距离、液位、井深、管道长度、流速等场合。利用超声波检测往往比较迅速、方便,且计算简单、易于做到实时控制,在测量精度方面也能达到工业实用的要求,因此得到了广泛的应用国内这一类的测距技术较为完善,但是这类系统外围电路相对复杂,显示部分不够形象,而且精度不高,大部分停留在厘米级别。
1.2 系统的功能、性能要求
本设计“高精度超声波智能测距系统”能够实现2cm-4m范围内的精确测量功能,精度可达0.1mm,LCD液晶屏汉字显示功能,以及距离分段报警功能。实物体积小、功耗低、便于嵌入到其他系统,具有一定的使用价值。
2.系统结构
2.1 系统结构框图
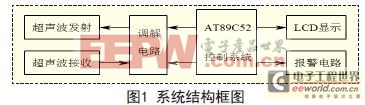
2.2 基本工作原理
通过单片机驱动程序在P1.2口产生40KHZ的方波经调解电路驱动超声波发射探头发生,遇到障碍物经反射由P1.1口超声波接收探头接收;经单片机内部定时电路计算时间,从而导出障碍物距离探头的距离由接在P0端口的LCD12864显示;距离阈值分为0-1m;1m-1.5m;1.5m以上三段不同频率报警。
3.硬件设计
超声波传感电路:
(1)采用IO触发测距,提供至少10us的高电平信号;
(2)模块自动发送8个40kHz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间(340m/S))/2;如图2所示。

4.软件设计
4.1流程图
如下图3所示为超声波测距系统的流程图。

4.2 程序执行过程
(1)单片机初始化;
(2)检测有无回波;
(3)定时初始化;
(4)发送超声波;
(5)关闭外部中断,读取时间,计算距离;
(6)判断是否超过阈值,是否报警。
循环执行程序。
5.调试结果及误差分析
本次设计采用的是HC-SR04超声波传感探头,对其测距性能的范围要求为4cm-4m,故实验是选取的测量距离是在其有效地测量范围内的数据测量。测量结果及误差分析如表1所示。

实验的主要误差来源于系统误差,包括对真值确定时的系统误差、人为操作不规范而引起的误差以及环境干扰而引起的不可避免的误差等。
就超声波探头的有限范围内的相对误差分析在0-2.667%的范围内,测量精度高,实现了0.1mm的小距离测量。
6.结论
本设计方案采用LCD12864能够做到实时显示;与传统的测距电路设计比较,本设计方案优化了电路结构,使电路结构更加简单,并且采用的元器件价格便宜,所有功能均能实现,其在原有测距范围4cm-4m的基础上,提高了测量的精度,可达到0.1mm的小距离测量,而且效果得到明显的改善。从而证实了本方案的可行性。
- 基于AD7791的海水温度和深度测量系统的设计(12-09)
- 基于LTC2757的高精度数模转换器的研究(12-09)
- 基于LTC2757的高精度数模转换器方案(12-08)
- 基于Maxim高精度电压基准MAX6175的6位半数字表头设计方案(12-05)
- 单芯片解决方案的高精度数字化电子秤你值得拥有(01-17)
- 高精度功率分析仪应对电力变压器的测试需求(12-19)