智能追光锂电充电系统设计
对电池造成的损害,CN3063内部集成有电池温度监测电路。电池温度监测时通过测量TEMP管脚的电压实现的,当TEMP管脚的电压大于46%*VIN超过0.15秒时,芯片正常工作;如果TEMP管脚的电压小于46%*VIN超过0.15秒时,则CN3063认为电池的温度超出范围,充电将暂时停止,当TEMP管脚的电压又重新大于46%*VIN超过0.15秒时,充电会继续。
本系统中将TEMP管脚接到地,禁用电池温度监测功能,并以DS18B20作为替代,实时监测锂电池电压,方便观察。
再充电
当一个充电周期结束时,如果电池电压Kelvin检测输入端的电压低于再充电阀值时,CN3063自动开始一个新的充电周期。
恒流/恒压/恒温充电
采用恒流/恒压/恒温模式对电池充电,在恒流模式中,如果CN3063功耗过大,器件的结温接近115°C,放大器Tamp开始共工作,自动调整充电电流,使器件的结温保持在大约115°C。
漏极开路状态指示输出端
有两个漏极开路状态指示端 和
和 ,这两个状态指示端可以驱动发光二极管或单片机端口。用来指示充电状态,在充电时,为低电平;用来指示充电结束状态,当充电结束时,为低电平。当电池的温度处于正常温度范围之外超过0.15秒时,和管脚都输出高阻态。当电池没有接到充电器时,充电器很快将输出电容充电到恒压充电电压值,由于电池电压Kelvin检测输入端FB管脚的漏电流,FB管脚和BAT管脚的电压将慢慢下降到再充电阀值,这样在FB管脚和BAT管脚形成一个纹波电压为100mv的波形,同时输出脉冲信号表示没有安装电池。当电池连接端BAT管脚的外接电容4.7uF时,脉冲的周期大约为10Hz。系统中管脚接红色LED, 管脚接绿色LED。
,这两个状态指示端可以驱动发光二极管或单片机端口。用来指示充电状态,在充电时,为低电平;用来指示充电结束状态,当充电结束时,为低电平。当电池的温度处于正常温度范围之外超过0.15秒时,和管脚都输出高阻态。当电池没有接到充电器时,充电器很快将输出电容充电到恒压充电电压值,由于电池电压Kelvin检测输入端FB管脚的漏电流,FB管脚和BAT管脚的电压将慢慢下降到再充电阀值,这样在FB管脚和BAT管脚形成一个纹波电压为100mv的波形,同时输出脉冲信号表示没有安装电池。当电池连接端BAT管脚的外接电容4.7uF时,脉冲的周期大约为10Hz。系统中管脚接红色LED, 管脚接绿色LED。
表3列出了两个状态指示灯及其对应的充电状态。
表3状态指示灯与充电状态关系

(5)温度监测
方案一:采用热敏电阻做传感器件。热敏电阻与温度的变化是非线性的,而8位单片机的计算能力有限,在使用时,需摒弃复杂的计算公式,改用查表法算取温度。温度的精度值取决于AD采样精度,温度表格精度和热敏电阻精度。
方案二:采用DS18B20温度传感器。使用时,只需编写严格的时序,即可直接读出温度值,低四位进行小数近似化处理,可以得到较为准确的温度值。
由于热敏电阻与温度的变化是非线性的,而且无法使用复杂的计算公式得出精准的温度值,我们采用方案二,当锂电池温度大于60°C时,停止充电。
DS18B20的应用电路如图15所示。
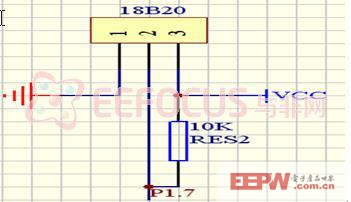
图15温度监测
(6)照明灯控制
方案一:通过检测光敏电阻阻值的大小,判断白天黑夜,并根剧光敏电阻阻值调节照明灯亮度。
方案二:通过检测太阳能电池板输出电压,来判断白天黑夜,并进一步调节照明灯亮度。
比较两种方案,方案二中太阳能电池板输出电压不仅会受到外界光强的影响,还跟温度高低等其他因素有关系,为避免误判断,我们采用方案一,且方案一中,根据光敏电阻阻值大小,更易于使用脉宽调制(PWM)模拟DA功能。
应用电路如图16所示。
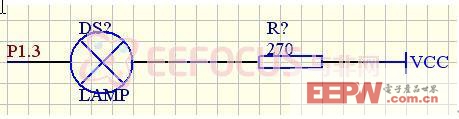
图16照明灯
当检测到外界光强低于阀值时,打开照明灯,并使用STC12C5A60S2单片机的一路PCA输出PWM波,模拟DA功能,程序如下:
void SetLed(uchar PWM_LOW)
{
CCON=0; //PCA控制寄存器初始化
CL=0; //PCA计数器低8位清零
CH=0; //PCA计数器高8位清零
CMOD=0X02; //模式设置
CCAP0H=CCAP0L=PWM_LOW; //将光敏电阻值送给PCA捕捉/比较寄存器
CCAPM0=0X42; //设置PCA工作模式
CR=1; //启动PCA计数器
}
rg0=GetADCResult(2); //光敏电阻值采集
if(rg0>=0xa0) //电阻值大于阀值时,调光
SetLed(rg0-0xa0);
else
SetLed(0); //否则,发送0,即关闭照明灯
(7)追光控制
方案一:采用双舵机,搭建舵机云台。此方法可以全方位的追光,但是在实际使用中,舵机存在“抢电”的现象,会给供电电压带来较大的波动,甚至会产生较强的抖动,不利于控制,也不利于电能的收集。
方案二:只采用一个舵机,并结合机械追光。经查阅资料,当太阳能电池板与地平面的角度和当地的维度相同时,光能利用率最大。本方案中利用的机械部件,可人为的调节太阳能电池板与地平面的角度,再通过控制伺服舵机实现追光。
通过比较,我们选用方案二。方案二更节约电能,同时,在太阳能电池板的不同位置放置三个光敏电阻,利用光敏电阻对环境亮暗的敏感性设计寻找光源传感器,即光敏电阻和已知电阻的分压电路,采集光敏电阻端和已知电阻端电压,通过模拟量的电压分析,即可模糊地判断光线的强弱。与另两路寻光传感器电路中得到的电压值相比较,即可判断出光源的位置。利用单舵机机械结构实时把光源位置方向锁在正中间光敏电阻所对的方向。
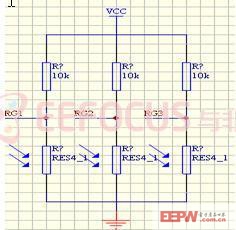
图17光敏电阻检测
由于光敏电
智能追光 太阳能 CN3063 锂电池充电 AVR单片机 相关文章:
- 嵌入式碟式太阳能热发电控制器研制与应用(06-28)
- 太阳能光伏逆变器选用需遵循正确方法(12-09)
- 现有光伏和太阳能并网系统的电池后备电源选项(12-09)
- 空气能热水器和太阳能热水器对比浅析(12-09)
- 浅析太阳能逆变器的功能以及分类(12-09)
- 太阳能电池组件功率计算(12-09)