ARM单片机超声波监测预警系统电路设计
障碍物距离检测电路的设计
在本系统中超声波测距电路是由MICROCHIP的PIC16C57设计而成的,选用的超声波传感器是T/R40-16压电陶瓷传感器。在工作中,主控器PIC16C57发出信号使发射端的超声波换能器发出加以电压激励,其受激励后以脉冲的形式发射超声波,当超声波接收器接收到回波信号时,传回到主控器中,从脉冲信号开始发射时主控器中的定时器便开始计时,接收到回波信号时停止计时。所侧出的时间间隔再乘以声速就得到了两倍的距离值。从而计算出障碍物到发射点的距离。其电路图如图2所示。
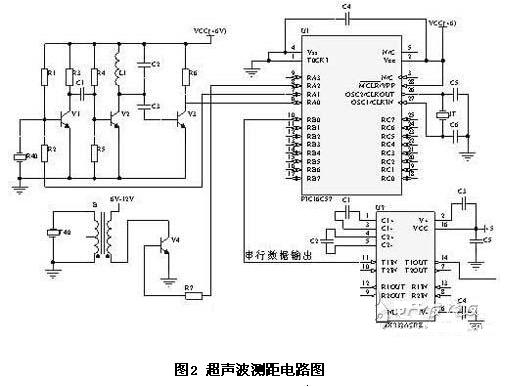
距离值通过PIC16C57的10脚进行串行输出,经MAX232芯片后与ARM的串口相连。芯片MAX232是为RS232标准串口设计的接口电路,它完成TTL电平和RS232电平的转换。
声光报警电路设计
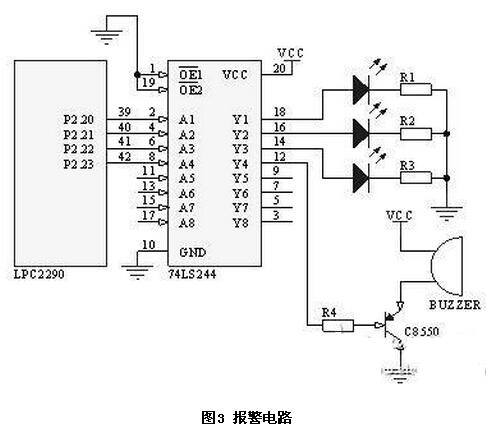
本系统要求根据影响装载机稳定性的障碍物距离的临界值对危险状况进行三级报警。当处于低危险状况时,只有指示灯绿灯被点亮,提醒驾驶者注意;当危险级别增高时,指示灯黄灯点亮,同时伴随有舒缓的蜂鸣声,提醒驾驶者采取措施;当达到最高危险级别时,指示灯红灯被点亮,同时蜂鸣声由舒缓转为急促,提醒驾驶者赶紧制动。设计中,分别采用了LPC2290的P2.20(GPIOA4)驱动绿色LED,P2.21(GPIOA5)驱动黄色LED, P2.22(GPIOA6)驱动红色LED,P2.23(GPIOA7)驱动蜂鸣器。所设计的报警电路如图3所示。
通过试验验证,该系统已完成了所需的功能要求,最大测量值为9.99m,误差 ≤0.01m。安装非常方便,便于使用。但该系统还有一个不足,即用超声波传感器检测车辆前方路面信息时,如果是凸起的障碍物能有效的检测到,但当前方为凹坑时便检测不出来,所以有待于进一步研究。
ARM单片机超声 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)