连续超声波位置跟踪器的设计原理及其在虚拟现实系统中的应用实现
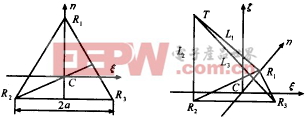
图1 参考点的分布示意图 设点T到R1、R2和R3三点的距离分别为L1、L2和L3,如图1所示,则可列出以下方程组:
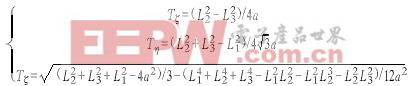
求得T的位置坐标为:
由此可以推知,当在T点固定超声波发射器,在R1、R2和R3处分别固定超声波接收器,根据发射信号与接收信号之间的相位关系分别测量三个接收器和发射器之间的距离[7,8],将测量所得到的距离和接收器的分布参数代入式(2)即可求出发射器的三维位置坐标,即运动物体的位置坐标.由于超声波测距系统的快速响应特征,通过一定采样频率的连续测量即可实现运动物体位置坐标的快速动态测量.
3.测距原理 L1=NMv/f1 (7) 但由于音频调制信号的频率较低,相位差ΔΦM的测量精度受到数字鉴相器分辨力和其它信号处理电路分辨力的限制,导致L的分辨力受到限制.为此,在保证L1的分辨率高于超声载波波长λc的前提下,从接收到的AM调制信号中提取载波信号RU,用数字鉴相器测量发射载波信号TU和接收载波信号RU之间的ΔΦC,数字鉴相器的插值频率为f2,鉴相器的计数结果为NC,则距离L可以表示为: L=int(L1/λC)+NCv/f2 和传统的连续超声波相位差测距法相比较,上述连续调幅超声波测距法不仅继承了测量范围大、刷新频率高、测距精度高等优点,而且克服了处理电路复杂和需要粗测基准的缺点.它也不同于音频测距法,不会受到环境声音的干扰,也不会造成环境声音污染. 三、跟踪器设计 |
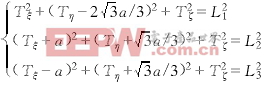 (1)
(1) (2)
(2) 要求发射器最大测量高度满足hmax
要求发射器最大测量高度满足hmax 误差满足
误差满足 ,则2a应该分别满足式(3)~(6)
,则2a应该分别满足式(3)~(6) (3)
(3) (4)
(4)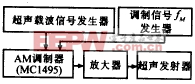
图2 发射器电路原理框图
图3 接收器电路原理框图 数字鉴相器的工作波形如图4所示. |
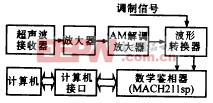

图4 数字鉴相器的工作波形图 至于该测距系统的电路设计、实验结果和性能分析请参考文献[7].
图5 超声波位置跟踪器的原理框图 四、实验结果与分析 |

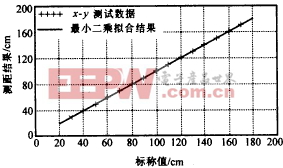
图6 测距结果与标称距离的比较 实验中使用发散角α=60°的换能器,测距单元的距离测量范围为30cm |
虚拟现实 系统 应用 实现 及其 原理 超声波 位置 跟踪 相关文章:
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)