CAN总线通信原理分析
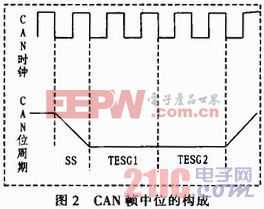
,对于高速总线,控制器在TESG1和TESG2之间对总线进行采样判别。
2.2 固定的帧结构
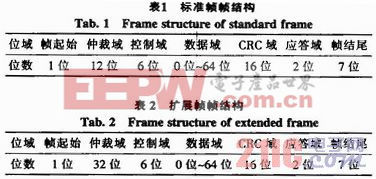
CAN协议中明确定义的固定的帧结构,便于CAN控制器和收发器对总线状态进行监测,在CAN2.0协议规范中,分为标准帧和扩展帧两种帧结构,两者区别只在于仲裁域,标准帧采用11位标识符,而扩展帧有29位标识符,具体的标准帧、扩展帧帧结构如表1、表2所示。
2.3 硬同步和再同步
2.3.1 硬同步
所谓硬同步就是指在总线空闲期间(即总线电平表现为连续的隐性位),控制器一旦检测到从隐性电平到显性电平的跳变,就说明此时总线上有站点开始发送数据,则强制CAN控制器的位状态计数器同步到图2所示的SS段,同时位时钟从此开始重新计数(CAN位时间由上层软件设定)。硬同步用于帧的起始判定。
2.3.2 再同步
在CAN总线协议中,再同步是基于位填充机制实现的。与HDLC协议类似,在CAN的帧结构中,从帧起始到CRC序列位为止,一旦检测到5个连续相同极性的位,CAN控制器自动插入一个极性相反的位。再同步就是在数据传输过程中,CAN控制器通过检测总线上的跳变沿与节点内部位时间的差异来调整相位调整段1和相位调整段2,调整大小是由同步跳转宽度编程设定的,调整大小单位为TQ。具体调整规则是,在传输过程中,由CAN控制器检测到的总线上的跳变沿如果位于节点内部的SS位时间段内,则不需要调整;若跳变沿位于TESG1段,说明总线上的位时间相对于节点的位时间有延迟,则CAN控制器延长节点的TESG1位时间段,若延迟时间值(T0值)大于同步跳转宽度,延长时间为同步跳转宽度值,否则节点的CAN控制器延长其与总线位时间的差值;若跳变沿位于TESG2段,说明总线上的位时间相对于节点的位时间有超前,则CAN控制器减少节点的TESG2位时间段,具体调整规则与TESG1段的调整规则相似。
3 CAN总线地址机制分析
不同于工业以太网、RS485等总线,CAN总线是通过数据包ID而非节点地址来收发数据的,即CAN总线上的节点没有固定的地址,取而代之的是每个节点都需要通过软件配置一个ID表(在该节点的验收滤波器单元中),如果总线上的数据包的ID号在该节点的ID表中存在,则数据包成功通过该节点的验收滤波器单元的验收,并将被送到上层软件处理单元并进行相应的数据处理,否则,该数据包被丢弃。举例来说,若总线上的节点A想发送数据包到节点B,则该数据包的ID号必须位于节点B的ID表中,同理,若节点A想广播数据包到总线上,则该数据包的ID号必须位于总线上所有其它节点的ID表中。如前所述,ID表是通过软件进行配置的,但验收滤波功能却是通过CAN控制器中的验收滤波器这个硬件单元进行的,所以从速度上来说,验收造成的延迟很小。另外,采用这种地址机制的优点还在于是采用此总线的系统具有很高的灵活性,即新加入或删除的节点不会影响系统原有节点间的通信。

下面将以恩智浦公司的LPC2478芯片集成的CAN控制器为例,具体说明CAN总线系统的地址配置方法。如图3所示,首先根据总线上所需传输的数据包进行分类,即对数据包ID和相应的节点进行规划,例如在我们的系统中主要有如下几类数据包:查询数据包、控制命令数据包(包括动作和参数数据包)、报警数据包及反馈参数数据包,对应的节点特性是查询数据包和控制命令数据包主要是主站发送给各从站单元,而报警数据包和反馈参数数据包主要由从站各节点单元发送给主站单元节点。然后,根据ID分类情况配置各节点的验收滤波器单元,具体的配置方法是:首先根据节点特点配置相应的验收滤波器工作模式:关闭模式(不接收总线报文)、旁路模式(接收总线上所有的报文)和正常工作模式(硬件滤波)。若配置为正常工作模式时,接着就需配置相应的验收滤波器表(ID表),即将该节点需要接收的数据包ID号的填充到该节点控制器相应的ID表区域中,而这样就完成了CAN总线节点的地址分配工作。一般而言,ID表分为如下4个区域:明确的标准帧标识符区、标准帧组格式标识符区、明确的扩展帧格式标识符区以及扩展帧组格式标识符区。其中,明确格式是单个独立的ID标识符,而组格式区时连续编号的ID标识符。
4 CAN总线仲裁机制分析
总线仲裁,是指当总线上有多个节点在同时发送数据时总线协议的处理方法。CAN总线采用的是无破坏性的仲裁机制,即若总线上的多个节点同时发送数据,具有高优先级数据包的节点仲裁胜出,可以继续发送数据,而其它仲裁失败的节点将退出发送状态而转为接收节点,与其他总线仲裁机制(例如局域网的CSMA/CD)相比,其不仅不会破坏已发送的数据,并且不会造成发送数据的延迟,是CAN总线与其他总线相比的优点之一,
- Amazon Kindle 2全球无线版——拆解&深度分析(04-09)
- 基于SPCE061A的射频读写器信号分析系统设计(08-26)
- 安捷伦与美国海军签手持式频谱分析仪大合同(12-01)
- 基于频谱分析来的RF功率和寄生噪声辐射限制(07-25)
- 矢量网络分析仪在移动网络建设和维护中的应用(12-05)
- 安捷伦保持业界50GHz最高噪声测量精度(12-10)