高压同步电机全数字化矢量控制变频器
时间:02-20
来源:互联网
点击:
2 全数字化矢量控制方式技术方案的原理
2.1技术方案详细阐述
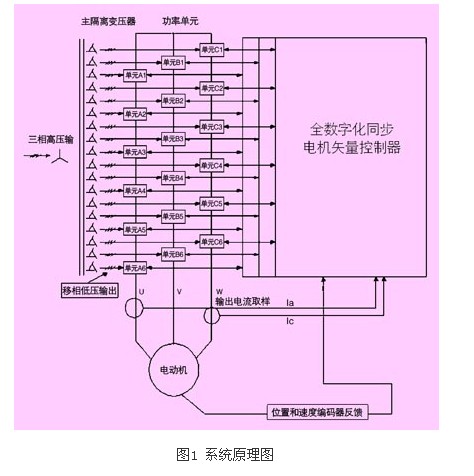
鉴于现有技术缺点,和要实现的技术目的,我们要实现的高压同步电机矢量控制变频器的实现由以下技术特点和单元组成,三相高压电输入移相隔离变压器,经移相隔离降压多路交流输出后,输入到带能量回馈的功率单元igbt整流并滤波成直流再经igbt逆变输出到同步电机;电机的位置速度传感器反馈的信号经高速串行编码传输方式传送给主控板的fpga进行解码处理后,送给dsp进行数据运算处理;电流反馈经霍尔传感器采样,上传信号板经模拟信号处理电路滤波处理后再上传给dsp主控板的ad采样并运算;主控板与上位机的人机界面进行实时数据通信,并上报系统的各项运行参数和故障状态;输入输出信号单元板与主控制器进行通迅,处理外部输入输出信号的控制功能;系统的原理如图1所示。
2.2交-直-交单元串联多电平方式
现在国内的同步电机变频器,大部分采用的是交-交变频,和交-直-交变频器相比,缺点:驱动晶闸管复杂;输出频率范围低,只能达到电网频率得1/3运行;功率因数低,谐波污染严重。在一些控制场合,交-交变频器的原理带来了它在高速上的应用不能实现和动态响应慢的缺点。
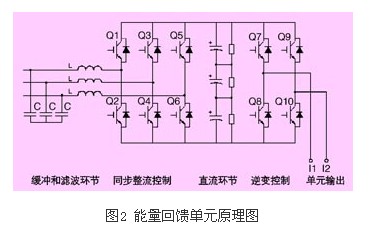
交-直-交方式使用移相的目的可以提高整流设备的脉波数,减小网侧高次谐波,整流变压器采用二次侧延边三角形移相,交-直-交方式频率调速范围宽,功率变换电路采用多电平变换器,如图2所示,各级功率模块均采用h全桥igbt驱动方式,由于输出电平数较多,输出波形阶梯增多,就可以使调制波接近正弦,降低电压跳变,这样谐波就少。另一个优点是输出电压的dv/dt较小,对负载电机的冲击小。如一些轧钢机,提升机,卷扬机。如果采用交-交变频,必须加减速机构。而交-直-交变频器可以在设备许可的范围内,其频率任意调节,这就解决了上述问题。
2.3基于能量回馈的功率单元
普通高压变频器不能直接用于需要快速起、制动和频繁正、反转的调速系统,如高速电梯、矿用提升机、轧钢机、大型龙门刨床、卷绕机构张力系统及机床主轴驱动系统等。因为这种系统要求电机四象限运行,当电机减速、制动或者带位能性负载重物下放时,电机处于再生发电状态。由于二极管不控整流器能量传输不可逆,产生的再生电能传输到直流侧滤波电容上,产生泵升电压。而以gtr、igbt为代表的全控型器件耐压较低,过高的泵升电压有可能损坏开关器件、电解电容,甚至会破坏电机的绝缘,从而威胁系统安全工作,这就限制了普通高压变频器的应用范围,而基于能量反馈的系统解决了上述问题,并且实现了真正的节能目标而不是浪费掉能量。
带能量回馈的功率单元,输入为移相隔离变压器副边降压绕组的三相,igbt的控制信号为经光纤传输过来的pwm信号控制其导通和关断,输出经单元串联后到电机。原理图如图2所示。
2.4数字矢量控制方式
矢量控制的目的是为了改善转矩控制性能,而最终实施仍然是对定子电流的控制。由于在定子侧的各物理量(电压、电流、电动势、磁动势)都是交流量,其空间矢量在空间以同步转速旋转,调节、控制和计算均不方便。因此,需借助于坐标变换,使各物理量从静止坐标系转换到同步旋转坐标系,站在同步旋转的坐标系上观察,电动机的各空间矢量都变成了静止矢量,在同步坐标系上的各空间矢量就都变成了直流量,可以根据转矩公式的几种形式,找到转矩和被控矢量的各分量之间的关系,实时地计算出转矩控制所需的被控矢量的各分量值——直流给定量。按这些给定量实时控制,就能达到直流电动机的控制性能。由于这些直流给定量在物理上是不存在的,是虚构的,因此,还必须再经过坐标的逆变换过程,从旋转坐标系回到静止坐标系,把上述的直流给定量变换成实际的交流给定量,在三相定子坐标系上对交流量进行控制,使其实际值等于给定值。在矢量变换的控制方法中,需用到静止和旋转的坐标系,以及矢量在各坐标系之间的变换,交流同步电机的矢量控制,需要把电机的abc三相定子静止坐标系的电流ia、ib、ic、变换成α和β两相静止坐标系(clarke变换),也叫三相-二相变换,再从两相静止坐标系变换成同步旋转磁场定向坐标系(park变换),等效成同步旋转坐标系下的直流电流iq、id(id相当于直流电动机的励磁电流;iq相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标逆变换(park逆变换)(clarke逆变换),实现对同步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交解耦控制。
2.1技术方案详细阐述
鉴于现有技术缺点,和要实现的技术目的,我们要实现的高压同步电机矢量控制变频器的实现由以下技术特点和单元组成,三相高压电输入移相隔离变压器,经移相隔离降压多路交流输出后,输入到带能量回馈的功率单元igbt整流并滤波成直流再经igbt逆变输出到同步电机;电机的位置速度传感器反馈的信号经高速串行编码传输方式传送给主控板的fpga进行解码处理后,送给dsp进行数据运算处理;电流反馈经霍尔传感器采样,上传信号板经模拟信号处理电路滤波处理后再上传给dsp主控板的ad采样并运算;主控板与上位机的人机界面进行实时数据通信,并上报系统的各项运行参数和故障状态;输入输出信号单元板与主控制器进行通迅,处理外部输入输出信号的控制功能;系统的原理如图1所示。
2.2交-直-交单元串联多电平方式
现在国内的同步电机变频器,大部分采用的是交-交变频,和交-直-交变频器相比,缺点:驱动晶闸管复杂;输出频率范围低,只能达到电网频率得1/3运行;功率因数低,谐波污染严重。在一些控制场合,交-交变频器的原理带来了它在高速上的应用不能实现和动态响应慢的缺点。
交-直-交方式使用移相的目的可以提高整流设备的脉波数,减小网侧高次谐波,整流变压器采用二次侧延边三角形移相,交-直-交方式频率调速范围宽,功率变换电路采用多电平变换器,如图2所示,各级功率模块均采用h全桥igbt驱动方式,由于输出电平数较多,输出波形阶梯增多,就可以使调制波接近正弦,降低电压跳变,这样谐波就少。另一个优点是输出电压的dv/dt较小,对负载电机的冲击小。如一些轧钢机,提升机,卷扬机。如果采用交-交变频,必须加减速机构。而交-直-交变频器可以在设备许可的范围内,其频率任意调节,这就解决了上述问题。
2.3基于能量回馈的功率单元
普通高压变频器不能直接用于需要快速起、制动和频繁正、反转的调速系统,如高速电梯、矿用提升机、轧钢机、大型龙门刨床、卷绕机构张力系统及机床主轴驱动系统等。因为这种系统要求电机四象限运行,当电机减速、制动或者带位能性负载重物下放时,电机处于再生发电状态。由于二极管不控整流器能量传输不可逆,产生的再生电能传输到直流侧滤波电容上,产生泵升电压。而以gtr、igbt为代表的全控型器件耐压较低,过高的泵升电压有可能损坏开关器件、电解电容,甚至会破坏电机的绝缘,从而威胁系统安全工作,这就限制了普通高压变频器的应用范围,而基于能量反馈的系统解决了上述问题,并且实现了真正的节能目标而不是浪费掉能量。
带能量回馈的功率单元,输入为移相隔离变压器副边降压绕组的三相,igbt的控制信号为经光纤传输过来的pwm信号控制其导通和关断,输出经单元串联后到电机。原理图如图2所示。
2.4数字矢量控制方式
矢量控制的目的是为了改善转矩控制性能,而最终实施仍然是对定子电流的控制。由于在定子侧的各物理量(电压、电流、电动势、磁动势)都是交流量,其空间矢量在空间以同步转速旋转,调节、控制和计算均不方便。因此,需借助于坐标变换,使各物理量从静止坐标系转换到同步旋转坐标系,站在同步旋转的坐标系上观察,电动机的各空间矢量都变成了静止矢量,在同步坐标系上的各空间矢量就都变成了直流量,可以根据转矩公式的几种形式,找到转矩和被控矢量的各分量之间的关系,实时地计算出转矩控制所需的被控矢量的各分量值——直流给定量。按这些给定量实时控制,就能达到直流电动机的控制性能。由于这些直流给定量在物理上是不存在的,是虚构的,因此,还必须再经过坐标的逆变换过程,从旋转坐标系回到静止坐标系,把上述的直流给定量变换成实际的交流给定量,在三相定子坐标系上对交流量进行控制,使其实际值等于给定值。在矢量变换的控制方法中,需用到静止和旋转的坐标系,以及矢量在各坐标系之间的变换,交流同步电机的矢量控制,需要把电机的abc三相定子静止坐标系的电流ia、ib、ic、变换成α和β两相静止坐标系(clarke变换),也叫三相-二相变换,再从两相静止坐标系变换成同步旋转磁场定向坐标系(park变换),等效成同步旋转坐标系下的直流电流iq、id(id相当于直流电动机的励磁电流;iq相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标逆变换(park逆变换)(clarke逆变换),实现对同步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交解耦控制。
电力电子 电子 电流 电动机 电路 电压 总线 自动化 变压器 传感器 霍尔传感器 二极管 电容 逆变器 霍尔效应 单片机 电阻 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- LED日光灯设计方案(12-22)
- 用FPGA平台实现工业电机最大效率(12-24)
- 2 kW有源功率因数校正电路设计(03-12)
- 低压配电系统中的静止无功发生器设计(03-26)