变频器控制功能的参数选择与典型应用
时间:03-14
来源:互联网
点击:
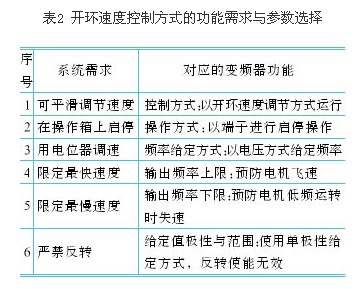
通过以上分析,可以得出如表2所示的分析结果。再按照表2中的归类后的功能需求,逐个分解为对变频器某些特定的、具体的参数的设置,这样就可以得到如图2(a)中的1#变频器所示的设计结构图了。图2(a)中的1#变频器采用的控制方式就是开环控制、编号0方式。
在本文中,对于常规控制方式的案例分析中,不准备将诸如表2中的对应的变频器功能再进一步转化为某个特定品牌的变频器参数,以免给读者造成品牌依赖性误导(以下常规控制方式的案例同),只想表达一种思维过程,供读者参考。而对于特殊应用场合的控制方式,将以具体品牌为例加以说明。
3.2 闭环速度控制方式
问题2的提出
同问题1的提出,如图2(a),略。
问题2的分析
首先,由于用户需要收卷电机的运行线速度与牵引电机保持一致,为达到这个目的,我们只要将牵引电机与收卷电机用同一个速度给定就可以实现这2台电机角速度的一致(当然,也可以将牵引电机实际运行速度的输出信号dc4~20ma或dc0~5v/10v作为收卷电机的速度给定信号,这2种方式的差异在于:前者为同步速率给定方式;而后者为主从随动给定方式,存在一定的响应延迟,具体差异分析,略);其次,由于收卷滚筒在运行过程中,随着纸张等物体被不断地缠绕在滚筒上,导致滚筒的半径在不断地增大,如果收卷电机的角速度保持不变,那么,收卷过程中的线速度也同样在不断地加快,为满足用户对收卷过程中线速度恒定的需求,必须想办法让收卷电机的角速度随滚筒半径的增长而降低,以实现线速度恒定的目的。为此,需要一个检测线速度的传感器信号,以此来作为变频器的速度反馈,告诉变频器要做出角速度的实时调整。在本例中,我们在夹送导向辊上安装了编码器(不能安装在电机轴或收卷滚筒轴上,否则,编码器测出的信号就不是线速度反馈信号而是角速度反馈信号),以编码器的脉冲率来表示实际线速度的快慢。如图2(a)中所示,这样对于2#变频器而言,它既有一个用电位器表示的给定速度,又有一个用编码器的脉冲来表示的实际速度反馈信号,因此,2#变频器就应该是一个闭环速度控制方式的应用案例。
通过以上对用户需求的分析,我们可以得出如表3所示的结果。
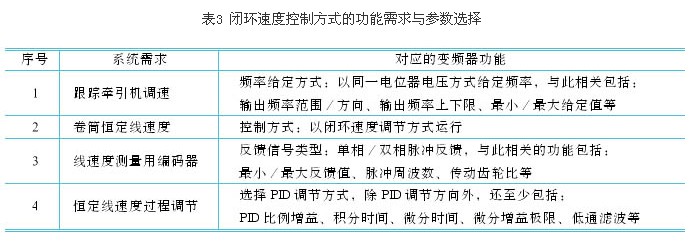
在表3中,我们略去了与闭环速度控制非直接相关的其它一些功能的列举,在实际应用中就像对基本参数的需求一样,同样需要对这些功能进行选择与相应参数的设置。
4 工艺过程闭环控制方式
传统的v/f控制实际上是一种角速度的控制模式,而闭环速度控制是通过对实际角速度的检测的一种调节控制。但是,在现实的许多应用场合,显然,我们并不只关心电机的速度,而可能更多地要关注生产工艺过程中的某些被控对象的参数测量值,这些参数包括:温度、压力、流量、液位等信号。比如,在混配料系统中,我们可能需要关心某种配料的质量或流量,而这个量却并不直接与电机的速度成正比例或反比例关系,这是工艺闭环过程控制与上面所叙述的闭环速度控制的根本差别,当然,工艺过程闭环控制也是一种闭环控制,它关注的不是速度而是工艺过程的参数变量。在诸如这样的一些应用场合,就需要我们采用工艺过程闭环控制方式。
问题3的提出
假定有一个需要进行混配料比例控制的用户,他的配料a和配料b由各自的配料电机送入配料搅拌筒中进行混合均匀搅拌,其中,配料b有生产过程决定其送料的多少,而配料a需要根据配料b的变化始终保持在搅拌筒混合料中的比例恒定,如图2(b)所示。现要求对配料a的电机进行变频控制,以实现如下具体需求:
(1) 配料a的比例可以自由设定;
(2) 既使在配料b的量是变化的时候,配料a在混料搅拌筒中的比例也要维持在设定比例。
问题3的分析
首先,用户对配料电机a的控制需求是要根据配料b的变化始终维持恒定的配料a所占比例的一种闭环控制方式,这个反馈信号是混料筒中的配料a所占的比例信号,它与电机的速度无关,因此,可以准确地定位这种控制需求为工艺过程闭环控制方式。其次,用户要求配料比可以在生产过程中根据需要进行设定,为此,需要提供配料a所占比例的设定手段—电位器给定配料比方式。椐此可以得到如表4所示的需求与对应功能。
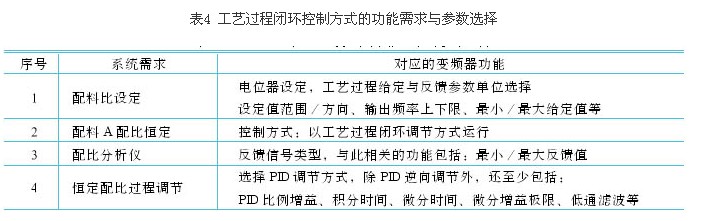
对比表4与表3,可以看见,他们之间的差异除了控制方式的选择区别外,还有一个最为明显的差异,那就是表4中作为控制对象的参考量与反馈值都是生产工艺过程中的参数(这样设定的参数与反馈的参数都更直接表达了生产过程状态,也更加直观明了),而不再是速度参数。撇开这些表面上的差异,几乎完全可以用一个虚拟的闭环“速度”控制来实现。从这个意义上讲,工艺过程闭环控制方式与闭环速度控制方式在本质上是没有差异的,它是闭环速度控制方式的延伸形式与变种应用。
电力电子 电子 电压 电流 电阻 传感器 编码器 电动机 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- LED日光灯设计方案(12-22)
- 用FPGA平台实现工业电机最大效率(12-24)
- 2 kW有源功率因数校正电路设计(03-12)
- 低压配电系统中的静止无功发生器设计(03-26)