基于DSP的永磁同步电机磁场定向控制器设计
时间:12-04
来源:互联网
点击:
介绍了一种采用DSP芯片TMS320LF2407A实现永磁同步电机磁场定向控制器的控制原理,给出了采用磁场定向控制策略来设计该控制器的硬件组成结构及软件设计流程。
1 引言
近年,交流伺服系统已经在机械制造、工业机器人、航空航天等领域得到广泛应用,其控制对象大多是永磁感应同步电动机(PMSM)。PMSM的转子采用永磁钢,属于元刷电机的一种,具有结构简单、体积小、易于控制、性能优良等优点。本文讨论的空间矢量控制的永磁同步电机控制器就是采用磁场定向算法并借助DSP的高速度来实现对转速的实时控制,
因而在各种状态下都有良好的控制性能,特别适用于对控制器体积及性能要求较高的应用场合。
2 磁场定向控制原理
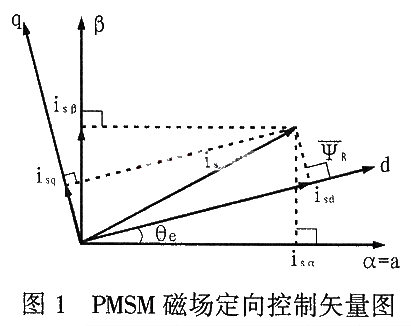
磁场定向控制主要是对交流电机的控制,它通过适时的控制转子的机械速度并调节相电流来满足电磁转距的要求。磁场定向控制矢量如图1所示。在图中的两直角坐标系中:αβ坐标系为定子静止坐标系,α轴与定子绕组α轴相重合;dq为转子旋转坐标系,d轴与转子磁链方向重合并以同步速度ωp逆时针旋转。两坐标系之间的夹角为θe。现把定子电流综合矢量is在旋转坐标系dq轴上分解如下:
is=isd+isq
在交流永磁同步电机中,转子为永磁钢,可认为转子电流综合矢量的模大小不变,常用常数值If代表。交流电机电磁转矩T与定子、转子电流综合矢量的普遍关系如下:
T=3PL12 | i1 |%26;#183;| i2 | sinψ/2
式中:P—极对数;
L12—定子、转子互感;
i1—定子电流综合矢量;
i2—转子电流综合矢量;
ψ—定子、转子综合矢量夹角;
图2
这样,电磁转矩就只随 | i1| 和角ψ变化。为了获得简单可控的转矩特性,可以使定子电流综合矢量始终在q轴上,即ψ=90o,从而得到:
T=3PL12IFIS/2
式中,Is为定子电流综合矢量的模。利用上式可以实现用定子电流综合矢量的模来直接控制电动机电磁转矩,从而使永磁同步电动机获得类似直流电动机的伺服性能,并可得到快速无静差的调节特性。控制器的控制结构框图2所示。
该速度控制系统由速度、电流双闭环实现,采用的算法由相应的模块实现。ia和ib由电流传感器检测获得,应用clark变换可得到定子电流在静止坐标中的投影值。进行park变换可以得到在旋转坐标系下的定子电流投影值。然后将电流和给定的参考值(Isqref和Isdref)进行比较,并经过PI调节器进行调节。电流调节的输出再经过反park变换,同时应用空间矢量技术并经过三相逆变器即可产生新的定子电压。为了能够控制电机的机械速度可通过外环提供参考电流值Isqref,从而得出机械速度参考值nrefo整个控制器以DSP芯片为核心再配以简单的外围电路,其控制算法及功能全部由软件实现。
3 永磁同步电机控制器的硬件结构
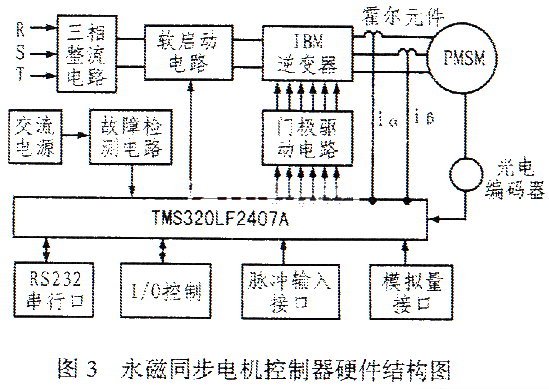
永磁同步电机磁场定向控制器以DSP数字信号处理器为核心。其硬件结构如图3所示。从图3可以看出,该系统主要由控制器核心TMS320LF2407A、外围接口电路、功率回路等几部分组成。
3.1 TMS320LF2407A的基本结构
TMS320LF2407A采用3.3V供电,因而功耗较小。同时因其指令执行周期可缩短到25ns,从而提高了控制器的实时处理能力。器件内含32kB的FLASH程序存储器,片内外设采用统一的外设总线和数据单元进行连接,其中包含两个事件管理模块,每个均由两个16位通用定时器、8个16位的脉宽调制(PWM)通道、3个捕获单元以及一套编码器接口电路组成;10位A/D转换器可采用序列灵活编程,同时可在一个转换周期内对一个通道进行多次转换。综上所述,TMS320LF2407A作为整个控制器的核心,集成了主要的电机外设控制部件,具有高速的运算能力及较高的采样精度,适合构成单片电机伺服控制器以完成实时要求很高的伺服控制任务。本系统就是利用它来实现矢量变换、电流环、速度环、位置环控制以及PWM信号发生等功能。
3.2 高速数据采集电路
该系统中的电动机转子位置和转速检测使用的是增量式光电编码器。其输出信号送入TMS320LF2407A的I/O和QEP单元后,即可通过位置的微分运算得到转速信号。而用霍尔电流传感器采样A、B两相电流即可获得实时的电流信息。
3.3 主电源电路
控制系统的主回路逆变器采用智能功率模块PM30CSJO60,该模块采用30A/600VIGBT功率管,它内含驱动电路,并设计有过压、过流、过热、欠压等故障检测保护电路。同时系统还设计了软启动电路以减少强电对主回路的冲击。在系统故障保护环节中还设置了主回路过压、欠压、过热、过载、制动异常、光电编码器反馈断线等保护功能,故障信号由软硬件配合检测,一旦出现保护信号,便可通过软件或硬件逻辑立刻封锁PWM驱动信号。
4 系统软件设计
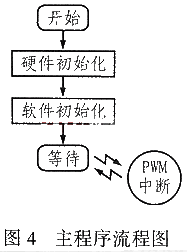
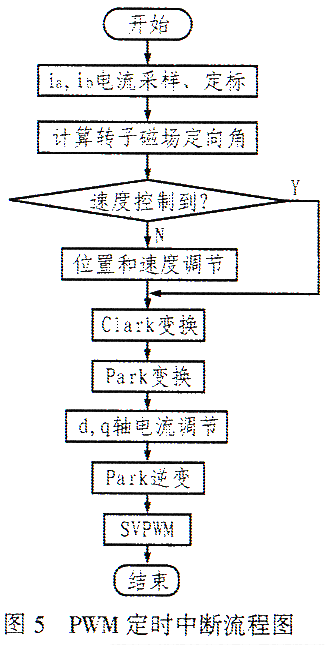
永磁同步电机磁场定向控制器软件包括DSP主程序和DSP伺服控制程序,其中DSP伺服控制程序由4个部分组成:PWM定时中断程序、光电编码器零脉冲捕获中断程序、功率驱动保护中断程序和通讯中断程序。主程序流程图如图4所示。主程序只完成系统硬件和软件的初始化任务,然后处于等待状态。完整的磁场定向控制(FOC)控制算法用PWM定时中断服务程序中实现。在一个中断周期内,从两路AD采样电流可计算转子位置角和转速,当完成所有反馈通道计算后,再调用正向通道中的计算模块函数,最后输出三相逆变器的空间矢量PWM波信号。其中断周期设定为60μs,0.5ms完成一次速度环和位置环的控制,控制器的PWM开关周期设置为16kHz。PWM定时中断程序的流程图如图5所示。通讯中断程序主要用来接收并刷新控制参数,同时设置运行模式;光电编码器零脉冲捕获中断程序可实现对编码器反馈零脉冲精确地捕获,从而得到交流永磁同步电机矢量变换定向角度的修正值;功率驱动保护中断程序则用于检测智能功率模块的故障输出,当出现故障时,DSP的PWM通道将被封锁,从而使输出变成高阻态。
5 结束语
本文提出了基于TMS320LF2407A的永磁同步电机磁场定向控制系统的实现方案,该方案充分利用了DSP的高速运算能力,从而使很多复杂的控制算法和功能得以实现。该系统集实时处理能力和控制器的外设功能于一身,从而实现了系统的实时性和快速性。同时也为开发小体积、智能型永磁同步电机控制系统提供了一种新的途径。
1 引言
近年,交流伺服系统已经在机械制造、工业机器人、航空航天等领域得到广泛应用,其控制对象大多是永磁感应同步电动机(PMSM)。PMSM的转子采用永磁钢,属于元刷电机的一种,具有结构简单、体积小、易于控制、性能优良等优点。本文讨论的空间矢量控制的永磁同步电机控制器就是采用磁场定向算法并借助DSP的高速度来实现对转速的实时控制,
因而在各种状态下都有良好的控制性能,特别适用于对控制器体积及性能要求较高的应用场合。
2 磁场定向控制原理
磁场定向控制主要是对交流电机的控制,它通过适时的控制转子的机械速度并调节相电流来满足电磁转距的要求。磁场定向控制矢量如图1所示。在图中的两直角坐标系中:αβ坐标系为定子静止坐标系,α轴与定子绕组α轴相重合;dq为转子旋转坐标系,d轴与转子磁链方向重合并以同步速度ωp逆时针旋转。两坐标系之间的夹角为θe。现把定子电流综合矢量is在旋转坐标系dq轴上分解如下:
is=isd+isq
在交流永磁同步电机中,转子为永磁钢,可认为转子电流综合矢量的模大小不变,常用常数值If代表。交流电机电磁转矩T与定子、转子电流综合矢量的普遍关系如下:
T=3PL12 | i1 |%26;#183;| i2 | sinψ/2
式中:P—极对数;
L12—定子、转子互感;
i1—定子电流综合矢量;
i2—转子电流综合矢量;
ψ—定子、转子综合矢量夹角;
图2
这样,电磁转矩就只随 | i1| 和角ψ变化。为了获得简单可控的转矩特性,可以使定子电流综合矢量始终在q轴上,即ψ=90o,从而得到:
T=3PL12IFIS/2
式中,Is为定子电流综合矢量的模。利用上式可以实现用定子电流综合矢量的模来直接控制电动机电磁转矩,从而使永磁同步电动机获得类似直流电动机的伺服性能,并可得到快速无静差的调节特性。控制器的控制结构框图2所示。
该速度控制系统由速度、电流双闭环实现,采用的算法由相应的模块实现。ia和ib由电流传感器检测获得,应用clark变换可得到定子电流在静止坐标中的投影值。进行park变换可以得到在旋转坐标系下的定子电流投影值。然后将电流和给定的参考值(Isqref和Isdref)进行比较,并经过PI调节器进行调节。电流调节的输出再经过反park变换,同时应用空间矢量技术并经过三相逆变器即可产生新的定子电压。为了能够控制电机的机械速度可通过外环提供参考电流值Isqref,从而得出机械速度参考值nrefo整个控制器以DSP芯片为核心再配以简单的外围电路,其控制算法及功能全部由软件实现。
3 永磁同步电机控制器的硬件结构
永磁同步电机磁场定向控制器以DSP数字信号处理器为核心。其硬件结构如图3所示。从图3可以看出,该系统主要由控制器核心TMS320LF2407A、外围接口电路、功率回路等几部分组成。
3.1 TMS320LF2407A的基本结构
TMS320LF2407A采用3.3V供电,因而功耗较小。同时因其指令执行周期可缩短到25ns,从而提高了控制器的实时处理能力。器件内含32kB的FLASH程序存储器,片内外设采用统一的外设总线和数据单元进行连接,其中包含两个事件管理模块,每个均由两个16位通用定时器、8个16位的脉宽调制(PWM)通道、3个捕获单元以及一套编码器接口电路组成;10位A/D转换器可采用序列灵活编程,同时可在一个转换周期内对一个通道进行多次转换。综上所述,TMS320LF2407A作为整个控制器的核心,集成了主要的电机外设控制部件,具有高速的运算能力及较高的采样精度,适合构成单片电机伺服控制器以完成实时要求很高的伺服控制任务。本系统就是利用它来实现矢量变换、电流环、速度环、位置环控制以及PWM信号发生等功能。
3.2 高速数据采集电路
该系统中的电动机转子位置和转速检测使用的是增量式光电编码器。其输出信号送入TMS320LF2407A的I/O和QEP单元后,即可通过位置的微分运算得到转速信号。而用霍尔电流传感器采样A、B两相电流即可获得实时的电流信息。
3.3 主电源电路
控制系统的主回路逆变器采用智能功率模块PM30CSJO60,该模块采用30A/600VIGBT功率管,它内含驱动电路,并设计有过压、过流、过热、欠压等故障检测保护电路。同时系统还设计了软启动电路以减少强电对主回路的冲击。在系统故障保护环节中还设置了主回路过压、欠压、过热、过载、制动异常、光电编码器反馈断线等保护功能,故障信号由软硬件配合检测,一旦出现保护信号,便可通过软件或硬件逻辑立刻封锁PWM驱动信号。
4 系统软件设计
永磁同步电机磁场定向控制器软件包括DSP主程序和DSP伺服控制程序,其中DSP伺服控制程序由4个部分组成:PWM定时中断程序、光电编码器零脉冲捕获中断程序、功率驱动保护中断程序和通讯中断程序。主程序流程图如图4所示。主程序只完成系统硬件和软件的初始化任务,然后处于等待状态。完整的磁场定向控制(FOC)控制算法用PWM定时中断服务程序中实现。在一个中断周期内,从两路AD采样电流可计算转子位置角和转速,当完成所有反馈通道计算后,再调用正向通道中的计算模块函数,最后输出三相逆变器的空间矢量PWM波信号。其中断周期设定为60μs,0.5ms完成一次速度环和位置环的控制,控制器的PWM开关周期设置为16kHz。PWM定时中断程序的流程图如图5所示。通讯中断程序主要用来接收并刷新控制参数,同时设置运行模式;光电编码器零脉冲捕获中断程序可实现对编码器反馈零脉冲精确地捕获,从而得到交流永磁同步电机矢量变换定向角度的修正值;功率驱动保护中断程序则用于检测智能功率模块的故障输出,当出现故障时,DSP的PWM通道将被封锁,从而使输出变成高阻态。
5 结束语
本文提出了基于TMS320LF2407A的永磁同步电机磁场定向控制系统的实现方案,该方案充分利用了DSP的高速运算能力,从而使很多复杂的控制算法和功能得以实现。该系统集实时处理能力和控制器的外设功能于一身,从而实现了系统的实时性和快速性。同时也为开发小体积、智能型永磁同步电机控制系统提供了一种新的途径。
DSP 机器人 电动机 电流 传感器 逆变器 电压 电路 总线 PWM 编码器 IGBT 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 智能视频多媒体技术的应用(05-31)
- 提高实时系统数据采集质量的研究(04-09)
- 2009视频监控:网络化及其推动的几大趋势(06-03)
- 高清化:视频监控领域的下一个里程碑(06-04)