串口速率,我拿什么识别你?
时间:09-22
来源:互联网
点击:
作者:jobs
UART串口,作为单片机最常用的通讯接口已经深入每一个嵌入式工程师的脑海。UART串口有着简单、实用的特性,嵌入式工程师常常用来将其作为调试系统的重要工具。UART串口的配置参数有很多,但是最常用,且需要修改的参数只有通讯波特速率这一个。可是这仅有的一个参数又常常给我们带来许多困扰。那么,我们对于串口波特速率该如何识别呢?笔者在这里介绍三种识别串口速率的方法,供大家参考。
UART(Universal Asynchronous serial Receiver and Transmitter)异步串行接收/发送接口,是嵌入式系统里最为重要的接口之一,它不仅用于板级芯片之间的通讯,而且应用于实现系统之间的通信和系统调度中。UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输,其字符数据帧格式如下图所示:
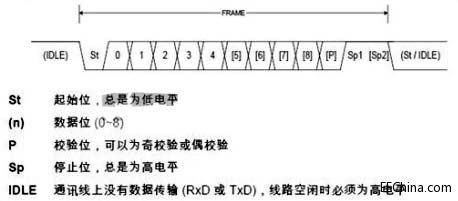
图1 UART字符数据帧格式
从上面图中的帧格式可以看出,UART数据帧由1个开始同步位,1个数据字,1个结束停止位,以及可选的校验位组成。由于UART为异步通讯,因此,其按位发送时必须严格遵守设定的波特率,而接收方也必须在相同的波特率下才能正确解析发送的字符数据。于是,接收方正确识别、配置波特率就相当关键了。下面笔者根据实际经验介绍三种识别串口波特率的方法:
穷举法
理论上,发送波特率可以设定为任意的值,但是平时我们使用的串口速率只有这么几种数值,如图2所示:

图2 常用串口波特速率
既然知道了常用串口速率,于是我们就可以一个一个试,总会有一个是成功。当然前提是我们知道主机发送的内容是什么,否则如何才能知道串口速率正确匹配呢!这里必须注意,在设定波特率与实际波特率成倍数的情况下,是可以读出来数据——当然,数据是错误的。
示波器法
示波器被秒为电子工程师的“眼睛”,我们可以就用这双眼睛来“看”出串口发送数据的波特率。这里我们先排除掉高端的带有数字逻辑分析功能的示波器,因为,这样的示波器已经远超笔者的IQ了,不是我们本篇讨论的内容。
上一部分,我们讲述了波形的帧格式,这里我们就利用波形,发送一个特殊的字符0x55(1010 1010B)。从理论上面分析,这个波形应该会产生一个按位翻转的波形效果。图3是笔者使用示波器采集下来的截图:
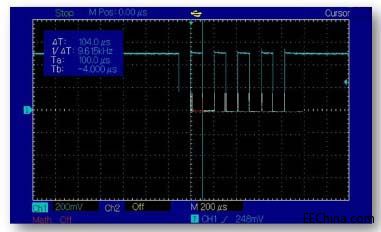
图3 9600bps发送0x55波形图
看到图3所示的波形图,再加上理论分析,我们知道波形是按位翻转,于是我们使用示波器的指针功能(cursor)来直接查看波特率。如图3左上角的测量结果显示,每位翻转的频率为9.615KHz,与我们设定的频率9600kbps基本相符,可以确定此发送频率为9600bps。
芯片自识别法
UART串口常常用来做为固件升级使用的接口,因此,其波特率要根据上位机的实际情况而定。如果环境较差时,就需要使用低波特率的通讯。这时,自动波特率识别的方法就诞生了。下面我们以TI Stellaris里bootloader里的串口波特率自动识别源程序为例进行分析:
int UARTAutoBaud(unsigned long *pulRatio){
long lPulse, lValidPulses, lTemp, lTotal;
volatile long lDelay;
// 配置systick,将其值设定为最大值;
HWREG(NVIC_ST_RELOAD) = 0xffffffff;
HWREG(NVIC_ST_CTRL) = NVIC_ST_CTRL_CLK_SRC | NVIC_ST_CTRL_ENABLE;
// 打开引脚的边沿触发中断
HWREG(GPIO_PORTA_BASE + GPIO_O_IBE) = UART_RX;
// 使能UART RXD引脚边沿触发中断
HWREG(NVIC_EN0) = 1;
// 采集引脚边沿中断,两个字节的边沿
while(g_ulTickIndex < MIN_EDGE_COUNT)
{
}
// 计算systick采样下来的值,对溢出进行处理
for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){
lTemp = (((long)g_pulDataBuffer[lPulse] -
(long)g_pulDataBuffer[lPulse + 1]) & 0x00ffffff);
g_pulDataBuffer[lPulse] = lTemp;
}
// 此循环计算两个连续脉冲之间的宽度
for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){
// 精确计算两个连续脉冲之间的宽度
lTemp = (long)g_pulDataBuffer[lPulse];
lTemp -= (long)g_pulDataBuffer[lPulse + 1];
if(lTemp < 0) {
lTemp *= -1;
}
// 验证两个边沿的脉宽是否正确,其算法如下:
// abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1] / PULSE_DETECTION_MULT
// 或者
// PULSE_DETECTION_MULT * abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1]
if((lTemp * PULSE_DETECTION_MULT) < (long)g_pulDataBuffer[lPulse + 1]) {
lTotal += (long)g_pulDataBuffer[lPulse];
lValidPulses++;
}
else{
lValidPulses = 0;
lTotal = 0;
}
// 7个有效脉冲,就可以计算UART串口速率
if(lValidPulses == 7) {
// 将最后一个脉冲加入计数器,并计算波特率
lTotal += (long)g_pulDataBuffer[lPulse];
*pulRatio = lTotal >> 1;
// 返回成功标识
return(0);
}
}
// 检测失败
return(-1);
}
UART串口有着这样或者那样的优点,但新兴的USB接口的USB DFU功能可以更加有效替代串口来完成固件升级;性能优越的CAN总线,其硬件价格不断下降,而且CAN总线的MAC接口更多集成在最新MCU芯片上;CAN2.0B接口正在挤压着UART接口器件的市场;对于我们普通民众,现在新型号电脑已经没有DB9串口座。在残酷的现实下,多年后也许只有我们电子工程师才会记得曾经的简单、实用的UART串口。
UART串口,作为单片机最常用的通讯接口已经深入每一个嵌入式工程师的脑海。UART串口有着简单、实用的特性,嵌入式工程师常常用来将其作为调试系统的重要工具。UART串口的配置参数有很多,但是最常用,且需要修改的参数只有通讯波特速率这一个。可是这仅有的一个参数又常常给我们带来许多困扰。那么,我们对于串口波特速率该如何识别呢?笔者在这里介绍三种识别串口速率的方法,供大家参考。
UART(Universal Asynchronous serial Receiver and Transmitter)异步串行接收/发送接口,是嵌入式系统里最为重要的接口之一,它不仅用于板级芯片之间的通讯,而且应用于实现系统之间的通信和系统调度中。UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输,其字符数据帧格式如下图所示:
图1 UART字符数据帧格式
从上面图中的帧格式可以看出,UART数据帧由1个开始同步位,1个数据字,1个结束停止位,以及可选的校验位组成。由于UART为异步通讯,因此,其按位发送时必须严格遵守设定的波特率,而接收方也必须在相同的波特率下才能正确解析发送的字符数据。于是,接收方正确识别、配置波特率就相当关键了。下面笔者根据实际经验介绍三种识别串口波特率的方法:
穷举法
理论上,发送波特率可以设定为任意的值,但是平时我们使用的串口速率只有这么几种数值,如图2所示:
图2 常用串口波特速率
既然知道了常用串口速率,于是我们就可以一个一个试,总会有一个是成功。当然前提是我们知道主机发送的内容是什么,否则如何才能知道串口速率正确匹配呢!这里必须注意,在设定波特率与实际波特率成倍数的情况下,是可以读出来数据——当然,数据是错误的。
示波器法
示波器被秒为电子工程师的“眼睛”,我们可以就用这双眼睛来“看”出串口发送数据的波特率。这里我们先排除掉高端的带有数字逻辑分析功能的示波器,因为,这样的示波器已经远超笔者的IQ了,不是我们本篇讨论的内容。
上一部分,我们讲述了波形的帧格式,这里我们就利用波形,发送一个特殊的字符0x55(1010 1010B)。从理论上面分析,这个波形应该会产生一个按位翻转的波形效果。图3是笔者使用示波器采集下来的截图:
图3 9600bps发送0x55波形图
看到图3所示的波形图,再加上理论分析,我们知道波形是按位翻转,于是我们使用示波器的指针功能(cursor)来直接查看波特率。如图3左上角的测量结果显示,每位翻转的频率为9.615KHz,与我们设定的频率9600kbps基本相符,可以确定此发送频率为9600bps。
芯片自识别法
UART串口常常用来做为固件升级使用的接口,因此,其波特率要根据上位机的实际情况而定。如果环境较差时,就需要使用低波特率的通讯。这时,自动波特率识别的方法就诞生了。下面我们以TI Stellaris里bootloader里的串口波特率自动识别源程序为例进行分析:
int UARTAutoBaud(unsigned long *pulRatio){
long lPulse, lValidPulses, lTemp, lTotal;
volatile long lDelay;
// 配置systick,将其值设定为最大值;
HWREG(NVIC_ST_RELOAD) = 0xffffffff;
HWREG(NVIC_ST_CTRL) = NVIC_ST_CTRL_CLK_SRC | NVIC_ST_CTRL_ENABLE;
// 打开引脚的边沿触发中断
HWREG(GPIO_PORTA_BASE + GPIO_O_IBE) = UART_RX;
// 使能UART RXD引脚边沿触发中断
HWREG(NVIC_EN0) = 1;
// 采集引脚边沿中断,两个字节的边沿
while(g_ulTickIndex < MIN_EDGE_COUNT)
{
}
// 计算systick采样下来的值,对溢出进行处理
for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){
lTemp = (((long)g_pulDataBuffer[lPulse] -
(long)g_pulDataBuffer[lPulse + 1]) & 0x00ffffff);
g_pulDataBuffer[lPulse] = lTemp;
}
// 此循环计算两个连续脉冲之间的宽度
for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){
// 精确计算两个连续脉冲之间的宽度
lTemp = (long)g_pulDataBuffer[lPulse];
lTemp -= (long)g_pulDataBuffer[lPulse + 1];
if(lTemp < 0) {
lTemp *= -1;
}
// 验证两个边沿的脉宽是否正确,其算法如下:
// abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1] / PULSE_DETECTION_MULT
// 或者
// PULSE_DETECTION_MULT * abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1]
if((lTemp * PULSE_DETECTION_MULT) < (long)g_pulDataBuffer[lPulse + 1]) {
lTotal += (long)g_pulDataBuffer[lPulse];
lValidPulses++;
}
else{
lValidPulses = 0;
lTotal = 0;
}
// 7个有效脉冲,就可以计算UART串口速率
if(lValidPulses == 7) {
// 将最后一个脉冲加入计数器,并计算波特率
lTotal += (long)g_pulDataBuffer[lPulse];
*pulRatio = lTotal >> 1;
// 返回成功标识
return(0);
}
}
// 检测失败
return(-1);
}
UART串口有着这样或者那样的优点,但新兴的USB接口的USB DFU功能可以更加有效替代串口来完成固件升级;性能优越的CAN总线,其硬件价格不断下降,而且CAN总线的MAC接口更多集成在最新MCU芯片上;CAN2.0B接口正在挤压着UART接口器件的市场;对于我们普通民众,现在新型号电脑已经没有DB9串口座。在残酷的现实下,多年后也许只有我们电子工程师才会记得曾经的简单、实用的UART串口。
单片机 嵌入式 示波器 电子 USB 总线 CAN总线 MCU 相关文章:
- 单片机智能频率信号装置(11-25)
- 单片机在医学信号检测仪中的应用(02-07)
- 单片机应用编程技巧(02-25)
- DSP与单片机通信的多种方案设计(03-08)
- 单片机与PC机串行通信的实现方法 (02-25)
- 单片机与PC通信的简化接口 (05-11)