51单片机-AT24C
时间:03-22
来源:互联网
点击:
AT24C02是由ATMEL公司提供的,IIC总线串行EEPROM(electronic eraser programmer read only memory),其容量为2kbit(256B),工作电压在2.7v"5.5v之间,生产工艺是CMOS。
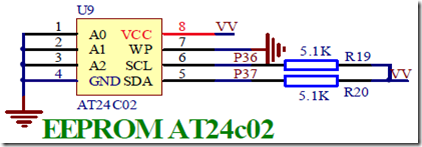
一般数字芯片都在左下角和右上角为GND,VCC。容量的计算方法:AT24Cxx :01"1024
容量 = xx * 1kbit。
写入过程:
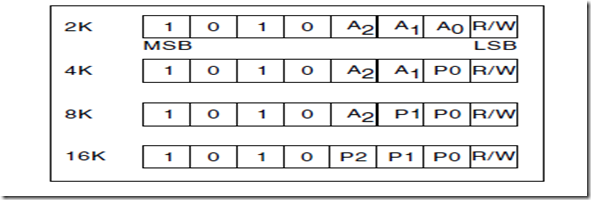
AT24C系列EEPROM芯片的固定部分为1010,A2,A1,A0引脚接高低电平后得到确定的3位编码,形成7位编码即为该器件的地址码。
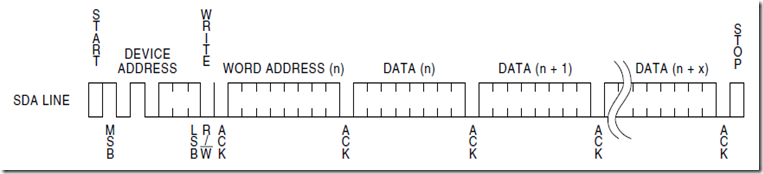
单片机进行写操作时,首先发送该器件的7位地址码和写方向位”0”(共8位,即一个字节),发送完后释放SDA线并在SCL线上产生第9个时钟信号。被选中的存储器器件在确认是自己的地址后,在SDA线上产生一个应答信号作为响应,单片机收到应答后就可以传送数据了。传送数据时,单片机首先发送一个字节的被写入存储器的首地址,收到存储器器件的应答后,单片机就逐个发送数据字节,但每发送一个字节后都要等待应答。AT24C系列片内地址在接收到每一个数据字节地址后自动加1,在芯片的“一次装载字节数”限度内,只需输入首地址。装载字节数超过芯片的“一次装载字节数”时,数据地址将“上卷”,前面的数据将被覆盖。

字节写:

页写:
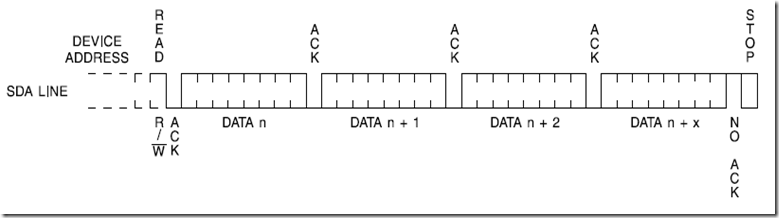
读入过程:
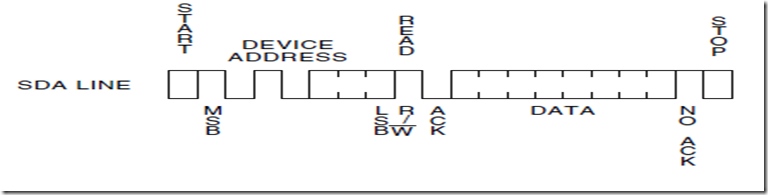
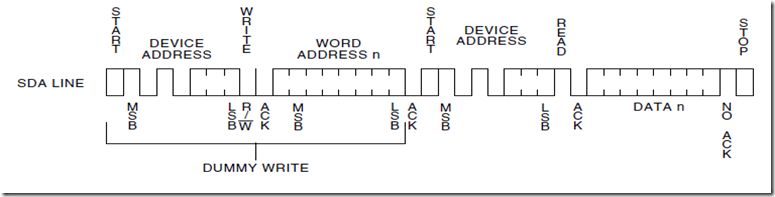
单片机先发送该器件的7位地址码和写方向位“0”(“伪写”),发送完后释放SDA线并在SCL线上产生第9个时钟信号。被选中的存储器器件在确认是自己的地址后,在SDA线上产生一个应答信号作为回应。
然后,再发一个字节的要读出器件的存储区的首地址,收到应答后,单片机要重复一次起始信号并发出器件地址和读方向位(“1”),收到器件应答后就可以读出数据字节,每读出一个字节,单片机都要回复应答信号。当最后一个字节数据读完后,单片机应返回以“非应答”(高电平),并发出终止信号以结束读出操作。

当前地址读:
随机读:
有序读:
IIC总线模拟时序图:
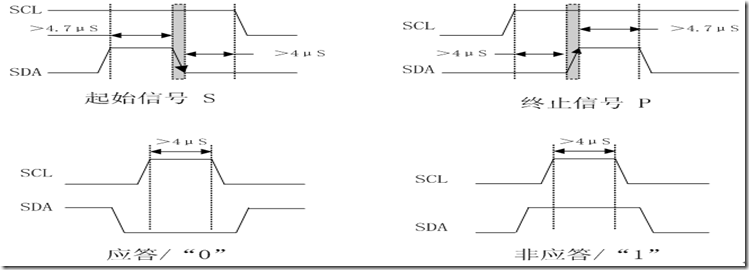
IIC总线应答时序图:

设备地址:
写周期:
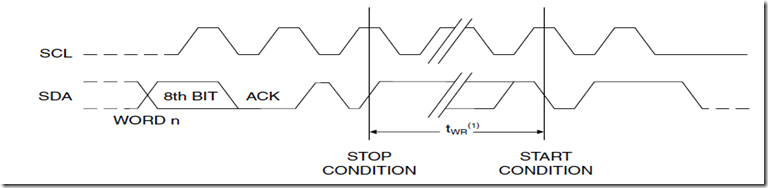
两次写之间要有一个10ms的twR间隔
写入EEPROM一个2,然后读出,在数码管上显示出来: #include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit SCL = P3^6;
sbit SDA = P3^7;
void delay()
{ ;; } //5us
void delay1(uchar x)
{
uchar a,b;
for(a=x;a>0;a--)
for(b=100;b>0;b--);
}
void Init(){
SCL = 1;
SDA = 1;
}
void start(){
SDA = 1;
delay();
SCL = 1;
delay();
SDA = 0;
delay();
}
void stop(){
SDA = 0;
delay();
SCL = 1;
delay();
SDA = 1;
delay();
}
void write(uchar date)
{
uchar i,temp;
temp=date;
for(i=0;i<8;i++)
{
temp=temp<<1;
SCL=0;
delay();
SDA=CY;
delay();
SCL=1;
delay();
}
SCL=0;
delay();
SDA=1;
delay();
}
uchar read()
{
uchar i,k;
SCL=0;
delay();
SDA=1;
delay();
for(i=0;i<8;i++)
{
SCL=1;
delay();
k=(k<<1)|SDA; // 将SDA赋给K的每一位
SCL=0;
delay();
}
return k;
}
void response(){
int i;
SCL = 1; //在SCL为高电平期间,进行应答
delay();
while((SDA == 1) && (i < 170))i++; //SCL释放总线,等待从设备应答,从设备会把SDA拉低
SCL = 0;
delay();
}
void At24c_Write(uchar address, uchar value){
start();
write(0xa0); //写入设备地址
response();
write(address); //写入首地址
response();
write(value); //写入数据
response();
stop();
}
uchar At24c_Read(uchar address){
uchar value;
start();
write(0xa0); //伪写,先写入设备地址
response();
write(address); //再写入要读取数据的首地址
response();
start(); //再次
write(0xa1); //写入要读取数据的地址,方向为1
response();
value = read(); //读取数据
stop();
return value;
}
void main(){
P1 = 0x0; // 位选,使最地位数码管被选中
Init();
At24c_Write(23,0x5b); // 在EEPROM的23这个地址上写数据0x5b
delay1(100); // 在写和读之间要多延时一会儿,否则器件处理不完
P2 = At24c_Read(23); // 读取23地址的数据,也就是刚才写入的数据
while(1);
}
掉电后数据不丢失,复位后,仍然从刚才掉电的数字开始往下显示。从0"9
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit SCL = P3^6;
sbit SDA = P3^7;
uchar temp, sum;
uint flag;
unsigned char code duan[]={
0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,
0x77,0x7C,0x39,0x5E,0x79,0x71};
void delay()
{ ;; } //5us
void delay1(uchar x)
{
uchar a,b;
for(a=x;a>0;a--)
for(b=100;b>0;b--);
}
void Init(){
SCL = 1;
SDA = 1;
}
void start(){
SDA = 1;
delay();
SCL = 1;
delay();
SDA = 0;
delay();
}
void stop(){
SDA = 0;
delay();
SCL = 1;
delay();
SDA = 1;
delay();
}
void write(uchar date)
{
uchar i,temp;
temp=date;
for(i=0;i<8;i++)
{
temp=temp<<1;
SCL=0;
delay();
SDA=CY;
delay();
SCL=1;
delay();
}
SCL=0;
delay();
SDA=1;
delay();
}
uchar read()
{
uchar i,k;
SCL=0;
delay();
SDA=1;
delay();
for(i=0;i<8;i++)
{
SCL=1;
delay();
k=(k<<1)|SDA; // 将SDA赋给K的每一位
SCL=0;
delay();
}
return k;
}
void response(){
int i;
SCL = 1; //在SCL为高电平期间,进行应答
delay();
while((SDA == 1) && (i < 170))i++; //SCL释放总线,等待从设备应答,从设备会把SDA拉低
SCL = 0;
delay();
}
void At24c_Write(uchar address, uchar value){
start();
write(0xa0); //写入设备地址
response();
write(address); //写入首地址
response();
write(value); //写入数据
response();
stop();
}
uchar At24c_Read(uchar address){
uchar value;
start();
write(0xa0); //伪写,先写入设备地址
response();
write(address); //再写入要读取数据的首地址
response();
start(); //再次
write(0xa1); //写入要读取数据的地址,方向为1
response();
value = read(); //读取数据
stop();
return value;
}
void main(){
uint i;
flag = 1;
P1 = 0x0; // 位选,使最地位数码管被选中
EA = 1;
ET0 = 1;
sum = 0;
temp = 0;
TMOD = 0x01;
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
TR0 = 1;
Init();
P2 = At24c_Read(23);
for(i = 0; i < 10; i++)
if(duan[ i] == P2){
sum = i;
break;
flag = 0;
}
while(1){
if(temp == 20){
temp = 0;
if(sum == 10){
sum = 0;
}
if(flag == 1){
At24c_Write(23,duan[sum]);
delay1(100);
P2 = duan[sum];
}
sum++;
}
}
}
void time0() interrupt 1{
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
temp++;
}
一般数字芯片都在左下角和右上角为GND,VCC。容量的计算方法:AT24Cxx :01"1024
容量 = xx * 1kbit。
写入过程:
AT24C系列EEPROM芯片的固定部分为1010,A2,A1,A0引脚接高低电平后得到确定的3位编码,形成7位编码即为该器件的地址码。
单片机进行写操作时,首先发送该器件的7位地址码和写方向位”0”(共8位,即一个字节),发送完后释放SDA线并在SCL线上产生第9个时钟信号。被选中的存储器器件在确认是自己的地址后,在SDA线上产生一个应答信号作为响应,单片机收到应答后就可以传送数据了。传送数据时,单片机首先发送一个字节的被写入存储器的首地址,收到存储器器件的应答后,单片机就逐个发送数据字节,但每发送一个字节后都要等待应答。AT24C系列片内地址在接收到每一个数据字节地址后自动加1,在芯片的“一次装载字节数”限度内,只需输入首地址。装载字节数超过芯片的“一次装载字节数”时,数据地址将“上卷”,前面的数据将被覆盖。
字节写:
页写:
读入过程:
单片机先发送该器件的7位地址码和写方向位“0”(“伪写”),发送完后释放SDA线并在SCL线上产生第9个时钟信号。被选中的存储器器件在确认是自己的地址后,在SDA线上产生一个应答信号作为回应。
然后,再发一个字节的要读出器件的存储区的首地址,收到应答后,单片机要重复一次起始信号并发出器件地址和读方向位(“1”),收到器件应答后就可以读出数据字节,每读出一个字节,单片机都要回复应答信号。当最后一个字节数据读完后,单片机应返回以“非应答”(高电平),并发出终止信号以结束读出操作。
当前地址读:
随机读:
有序读:
IIC总线模拟时序图:
IIC总线应答时序图:
设备地址:
写周期:
两次写之间要有一个10ms的twR间隔
写入EEPROM一个2,然后读出,在数码管上显示出来: #include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit SCL = P3^6;
sbit SDA = P3^7;
void delay()
{ ;; } //5us
void delay1(uchar x)
{
uchar a,b;
for(a=x;a>0;a--)
for(b=100;b>0;b--);
}
void Init(){
SCL = 1;
SDA = 1;
}
void start(){
SDA = 1;
delay();
SCL = 1;
delay();
SDA = 0;
delay();
}
void stop(){
SDA = 0;
delay();
SCL = 1;
delay();
SDA = 1;
delay();
}
void write(uchar date)
{
uchar i,temp;
temp=date;
for(i=0;i<8;i++)
{
temp=temp<<1;
SCL=0;
delay();
SDA=CY;
delay();
SCL=1;
delay();
}
SCL=0;
delay();
SDA=1;
delay();
}
uchar read()
{
uchar i,k;
SCL=0;
delay();
SDA=1;
delay();
for(i=0;i<8;i++)
{
SCL=1;
delay();
k=(k<<1)|SDA; // 将SDA赋给K的每一位
SCL=0;
delay();
}
return k;
}
void response(){
int i;
SCL = 1; //在SCL为高电平期间,进行应答
delay();
while((SDA == 1) && (i < 170))i++; //SCL释放总线,等待从设备应答,从设备会把SDA拉低
SCL = 0;
delay();
}
void At24c_Write(uchar address, uchar value){
start();
write(0xa0); //写入设备地址
response();
write(address); //写入首地址
response();
write(value); //写入数据
response();
stop();
}
uchar At24c_Read(uchar address){
uchar value;
start();
write(0xa0); //伪写,先写入设备地址
response();
write(address); //再写入要读取数据的首地址
response();
start(); //再次
write(0xa1); //写入要读取数据的地址,方向为1
response();
value = read(); //读取数据
stop();
return value;
}
void main(){
P1 = 0x0; // 位选,使最地位数码管被选中
Init();
At24c_Write(23,0x5b); // 在EEPROM的23这个地址上写数据0x5b
delay1(100); // 在写和读之间要多延时一会儿,否则器件处理不完
P2 = At24c_Read(23); // 读取23地址的数据,也就是刚才写入的数据
while(1);
}
掉电后数据不丢失,复位后,仍然从刚才掉电的数字开始往下显示。从0"9
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit SCL = P3^6;
sbit SDA = P3^7;
uchar temp, sum;
uint flag;
unsigned char code duan[]={
0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,
0x77,0x7C,0x39,0x5E,0x79,0x71};
void delay()
{ ;; } //5us
void delay1(uchar x)
{
uchar a,b;
for(a=x;a>0;a--)
for(b=100;b>0;b--);
}
void Init(){
SCL = 1;
SDA = 1;
}
void start(){
SDA = 1;
delay();
SCL = 1;
delay();
SDA = 0;
delay();
}
void stop(){
SDA = 0;
delay();
SCL = 1;
delay();
SDA = 1;
delay();
}
void write(uchar date)
{
uchar i,temp;
temp=date;
for(i=0;i<8;i++)
{
temp=temp<<1;
SCL=0;
delay();
SDA=CY;
delay();
SCL=1;
delay();
}
SCL=0;
delay();
SDA=1;
delay();
}
uchar read()
{
uchar i,k;
SCL=0;
delay();
SDA=1;
delay();
for(i=0;i<8;i++)
{
SCL=1;
delay();
k=(k<<1)|SDA; // 将SDA赋给K的每一位
SCL=0;
delay();
}
return k;
}
void response(){
int i;
SCL = 1; //在SCL为高电平期间,进行应答
delay();
while((SDA == 1) && (i < 170))i++; //SCL释放总线,等待从设备应答,从设备会把SDA拉低
SCL = 0;
delay();
}
void At24c_Write(uchar address, uchar value){
start();
write(0xa0); //写入设备地址
response();
write(address); //写入首地址
response();
write(value); //写入数据
response();
stop();
}
uchar At24c_Read(uchar address){
uchar value;
start();
write(0xa0); //伪写,先写入设备地址
response();
write(address); //再写入要读取数据的首地址
response();
start(); //再次
write(0xa1); //写入要读取数据的地址,方向为1
response();
value = read(); //读取数据
stop();
return value;
}
void main(){
uint i;
flag = 1;
P1 = 0x0; // 位选,使最地位数码管被选中
EA = 1;
ET0 = 1;
sum = 0;
temp = 0;
TMOD = 0x01;
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
TR0 = 1;
Init();
P2 = At24c_Read(23);
for(i = 0; i < 10; i++)
if(duan[ i] == P2){
sum = i;
break;
flag = 0;
}
while(1){
if(temp == 20){
temp = 0;
if(sum == 10){
sum = 0;
}
if(flag == 1){
At24c_Write(23,duan[sum]);
delay1(100);
P2 = duan[sum];
}
sum++;
}
}
}
void time0() interrupt 1{
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
temp++;
}
- 基于MSP430系列单片机的CAN总线接口转换卡设计(01-17)
- 各种通讯总线介绍(01-18)
- I2C总线原理及应用实例 (01-18)
- I2C总线在多机通信中的应用(01-17)
- 基于SPI总线的电能计量芯片ATT7022及其在配电监测终端的应用(01-18)
- CAN总线—PROFIBUS-DP总线网关的实现方法(01-17)