基于DM642的双目视觉监控系统设计与实现
时间:11-04
来源:互联网
点击:
由于双目视觉监控系统可以模仿人眼功能,感知三维世界信息,能够得到被测对象到CCD摄像机的深度信息,近几年已开始在需要三维立体检测的领域得到应用。另外,双目视觉监控系统也可用于多场景监控,大大扩展了人的视野范围。双目视觉一直是机器视觉领域的热门研究课题,在工业控制、智能交通、金融、公共安全等应用领域逐渐显示出非常广阔的发展前景。详细分析和研究基于DM642的双目视觉监控系统,给出系统的软硬件设计方案,并在DM642开发评估板(EVM)上实现系统功能。
1 双目视觉监控系统的硬件结构
该双目视觉监控系统的硬件总体结构如图1所示。在图1中,双通道视频编码、解码芯片采用Philips公司的SAA7105和SAA7115H。SDRAM使用的是Hynix公司容量为128 Mb的两片HY57V283220T系列芯片。FLASH选用AMD公司的AM29LV系列芯片,容量为8 Mb。核心处理芯片是TI公司的DM642,丰富的外围接口和完全的可编程性,使得它在数字视频处理领域具备了广泛应用的条件。
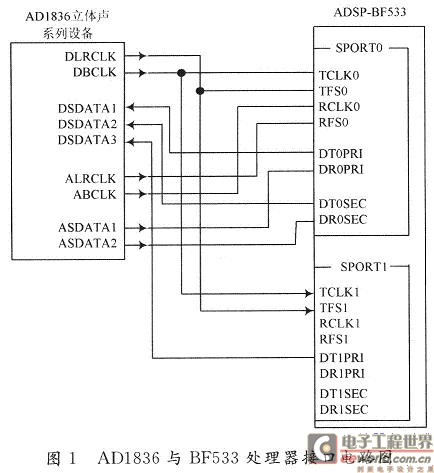
系统利用双CCD摄像机和2片SAA7115H,DM642的2个视频捕获视频端口Video Port0和VideoPort1组成了既相互独立又相互联系的双通道视频采集系统,实现了对双通道视频的实时采集。双CCD摄像机捕获的模拟视频信号经各自通道SAA7115H模/数转换后,形成BT.656格式的数字视频信号,经电平转换后,从DM642的Video Port0,1输入;在DM642中,双通道视频数据经过相应算法处理后,由VideoPort 2经视频编码芯片SAA7105数/模转换后输出PAL制式模拟视频信号到监视器进行显示,最终实现在一个监视器上可自由切换输出的双通道视频,也可同时显示。
系统通过DM642的EMIF接口,连接SDRAM和FLASH存储器。SDRAM扩展了系统的可用存储空间,系统的初始化代码和配置信息则存储在FLASH中。
2 系统软件设计
系统软件流程如图2所示。
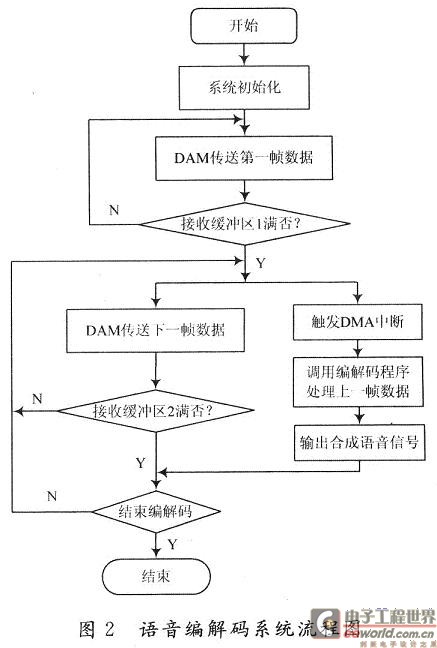
该系统软件采用基于DSP/BIOS的TI参考框架RF-5(Reference Framework),协助实现系统流程中各个环节的交互和协调同步。在进入DSP/BIOS的调度程序之前,程序需要初始化多个要使用的模块。包括:
(1)DM642和系统板的初始化。系统执行BIOS和CSL的初始化,EMIF、的CE0和CE1空间设定为允许高速缓存,设定DMA优先权队列长度为最大值,L2请求的优先权设定为最高,DMA管理器初始化时将其内部和外部的堆栈进行分配。
(2)RF-5模块初始化。系统的通道模块设定为RF-5,初始化RF-5中的ICC和SCOM模块必须的内部单元通信和信息传递,按照内部和外部的堆栈缓冲执行来设定通道。
(3)建立捕获和回放通道。建立和启动一个捕获通道,建立和启动一个回放通道。
在完成初始化工作后,系统进入DSP/BIOS调度程序管理下的采集、任务、显示3个线程。这3个线程通过RF-5的SCOM模块互相发送消息。采集线程主要负责对输入数据的获取,用以完成捕获数字视频信号的工作,然后将YUV 4:2:2格式进行色差信号重采样,以变为YUV 4:2:0格式。任务线程通过加载GEL控件(.gel),在生成的对话框中用键盘输入代表相应视频通道功能的数字,系统即调用与该数字对应的程序代码,从而实现相应通道的实时视频采集。显示线程等待获得任务线程处理完毕后的数据,对其进行反向的重采样,以便将得到YUV 4:2:2格式的图像送SAA7105进行A/D转换,并送监视器显示。
3 系统功能测试
在测试中,当程序加载完毕后,DM642 EVM开始工作,双通道开始实时采集视频,处理并显示在监视器上。由于程序设定,显示的画面为双通道视频图像。每个通道画面各占显示器的一半,如图3所示。
加载Channel.gel文件并运行,在生成的对话框中分别输入0,1(分别代表选择视频通道0,1工作)。程序运行后,监视器上显示的视频图像从显示双通道画面无延时的切换到显示视频通道0,1的画面,如图4所示。
测试结果表明,系统实现了双通道视频2个通道的自由协调切换,具有很好的实时性。
4 结 语
对基于DM642芯片的双目视觉监控系统进行分析,研究并给出了系统软硬件设计。使用GEL控件,实现了双通道实时视频采集、显示的协调工作,为双目视觉监控系统的后续研究提供了软硬件支持。
1 双目视觉监控系统的硬件结构
该双目视觉监控系统的硬件总体结构如图1所示。在图1中,双通道视频编码、解码芯片采用Philips公司的SAA7105和SAA7115H。SDRAM使用的是Hynix公司容量为128 Mb的两片HY57V283220T系列芯片。FLASH选用AMD公司的AM29LV系列芯片,容量为8 Mb。核心处理芯片是TI公司的DM642,丰富的外围接口和完全的可编程性,使得它在数字视频处理领域具备了广泛应用的条件。
系统利用双CCD摄像机和2片SAA7115H,DM642的2个视频捕获视频端口Video Port0和VideoPort1组成了既相互独立又相互联系的双通道视频采集系统,实现了对双通道视频的实时采集。双CCD摄像机捕获的模拟视频信号经各自通道SAA7115H模/数转换后,形成BT.656格式的数字视频信号,经电平转换后,从DM642的Video Port0,1输入;在DM642中,双通道视频数据经过相应算法处理后,由VideoPort 2经视频编码芯片SAA7105数/模转换后输出PAL制式模拟视频信号到监视器进行显示,最终实现在一个监视器上可自由切换输出的双通道视频,也可同时显示。
系统通过DM642的EMIF接口,连接SDRAM和FLASH存储器。SDRAM扩展了系统的可用存储空间,系统的初始化代码和配置信息则存储在FLASH中。
2 系统软件设计
系统软件流程如图2所示。
该系统软件采用基于DSP/BIOS的TI参考框架RF-5(Reference Framework),协助实现系统流程中各个环节的交互和协调同步。在进入DSP/BIOS的调度程序之前,程序需要初始化多个要使用的模块。包括:
(1)DM642和系统板的初始化。系统执行BIOS和CSL的初始化,EMIF、的CE0和CE1空间设定为允许高速缓存,设定DMA优先权队列长度为最大值,L2请求的优先权设定为最高,DMA管理器初始化时将其内部和外部的堆栈进行分配。
(2)RF-5模块初始化。系统的通道模块设定为RF-5,初始化RF-5中的ICC和SCOM模块必须的内部单元通信和信息传递,按照内部和外部的堆栈缓冲执行来设定通道。
(3)建立捕获和回放通道。建立和启动一个捕获通道,建立和启动一个回放通道。
在完成初始化工作后,系统进入DSP/BIOS调度程序管理下的采集、任务、显示3个线程。这3个线程通过RF-5的SCOM模块互相发送消息。采集线程主要负责对输入数据的获取,用以完成捕获数字视频信号的工作,然后将YUV 4:2:2格式进行色差信号重采样,以变为YUV 4:2:0格式。任务线程通过加载GEL控件(.gel),在生成的对话框中用键盘输入代表相应视频通道功能的数字,系统即调用与该数字对应的程序代码,从而实现相应通道的实时视频采集。显示线程等待获得任务线程处理完毕后的数据,对其进行反向的重采样,以便将得到YUV 4:2:2格式的图像送SAA7105进行A/D转换,并送监视器显示。
3 系统功能测试
在测试中,当程序加载完毕后,DM642 EVM开始工作,双通道开始实时采集视频,处理并显示在监视器上。由于程序设定,显示的画面为双通道视频图像。每个通道画面各占显示器的一半,如图3所示。
加载Channel.gel文件并运行,在生成的对话框中分别输入0,1(分别代表选择视频通道0,1工作)。程序运行后,监视器上显示的视频图像从显示双通道画面无延时的切换到显示视频通道0,1的画面,如图4所示。
测试结果表明,系统实现了双通道视频2个通道的自由协调切换,具有很好的实时性。
4 结 语
对基于DM642芯片的双目视觉监控系统进行分析,研究并给出了系统软硬件设计。使用GEL控件,实现了双通道实时视频采集、显示的协调工作,为双目视觉监控系统的后续研究提供了软硬件支持。
- 基于DM642机器视觉系统的设计与实现(07-23)
- 支持新一代工业检查系统的多核DSP(07-08)
- 基于DSP的快速Hough变换圆检测算法的实现(11-27)
- 基于DSP的嵌入式通用主动视觉系统(12-22)
- F1aSh存储器在TMS320C3X系统中的应用(11-11)
- 基于PIC18F系列单片机的嵌入式系统设计(11-19)