IPL算法,提升手机用户定位和导航体验的“法宝“
时间:04-17
来源:互联网
点击:
InvenSense供稿
当华为P10的发布会上余承东花了大篇幅介绍了HUAWEI Geo的功能,并把惯性导航作为核心功能介绍时,我们意识到手机的定位、导航体验将会是手机差异化的新突破点。人们驾车和步行时越来越多依赖手机导航,手机导航体验却越来越多地成为被诟病的重灾区:每当身处高楼林立的城市峡谷或高架下、隧道、停车库等没有GPS信号,导致引导播报误报,过了十字路口才提示要转弯,出隧道时该左转还是右转?……诸如此类的道路导航问题每天上演。为破上述困局,InvenSense会同国际知名手机品牌和几乎所有的地图厂商,历经数年的算法研究和提升,经过国内外大量的道路实测,IPL (InvenSense Positioning Library)惯性导航算法随着多款知名主力旗舰机的推出而日臻完善。
城市化导致路况复杂,惯导成刚需
如果用一句话来诠释惯性导航的优势,那就是在GNSS(全球卫星导航系统,例如GPS,北斗,伽利略)信号不可信的状态下,通过IMU惯性传感器(加速计+陀螺仪)的数据拟合,给出方向和速度的变化,实现导航功能。IPL(InvenSense Positioning Library)就是整合GPS+惯性传感器(加速计+陀螺仪)等硬件的数据,经过复杂地拟合和策略判断,实时计算最优的定位结果,从而实现定位和导航精度的大幅提升。
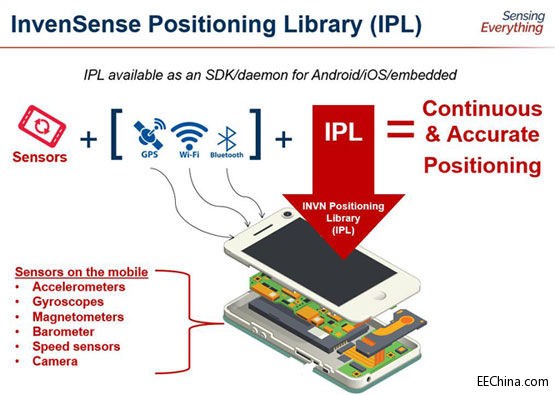
图1- InvenSense IPL算法让连续精准导航成为可能
考虑到主流系统的移植性,IPL从设计之初就以库的形式提供,可以非常方便的嵌入到Android系统中,同时此架构也便于未来的Linux等其它系统使用和移植,从而广泛地覆盖手机、车载导航、T-box等各种产品。
匹配地图路网信息,IPL最新版本进一步提升精度
目前,InvenSense已经与中国领先的两家地图供应商达成深度合作,将IPL与地图应用中的路网信息进行匹配(Map Matching),解决了IMU的惯性误差导致的导航路线偏航问题,修正车标短暂停滞,对GPS信号漂移进行改善,从而路网信息下发至客户在使用导航的应用中,用户体验得到进一步提升,并实现地图厂商FLP的业务在手机厂商的落地和差异化。
立足手机,发力新应用,布局未来
经过几代IPL算法在Mate8、Mate9、P9、P10、P10 plus等众多知名旗舰手机上成功地使用和不断提升,辅助导航已经成为毋庸置疑的重要用户体验和最贴心的微创新热点之一,并必将为革命性的室内导航应用奠定坚实的技术基础。同时,InvenSense积极布局多种未来应用,针对可穿戴市场的云应用Coursa Sports和基于位置和用户轨迹提供消费行为分析Coursa Retail 等一系列软件已经在海外初现威力。眼下,IPL已经开始在汽车导航中发挥重要作用,不远的将来当车载导航系统身处隧道中你会听到直接温馨提示:“GPS信号弱,IPL为您指引方向!”
当华为P10的发布会上余承东花了大篇幅介绍了HUAWEI Geo的功能,并把惯性导航作为核心功能介绍时,我们意识到手机的定位、导航体验将会是手机差异化的新突破点。人们驾车和步行时越来越多依赖手机导航,手机导航体验却越来越多地成为被诟病的重灾区:每当身处高楼林立的城市峡谷或高架下、隧道、停车库等没有GPS信号,导致引导播报误报,过了十字路口才提示要转弯,出隧道时该左转还是右转?……诸如此类的道路导航问题每天上演。为破上述困局,InvenSense会同国际知名手机品牌和几乎所有的地图厂商,历经数年的算法研究和提升,经过国内外大量的道路实测,IPL (InvenSense Positioning Library)惯性导航算法随着多款知名主力旗舰机的推出而日臻完善。
城市化导致路况复杂,惯导成刚需
如果用一句话来诠释惯性导航的优势,那就是在GNSS(全球卫星导航系统,例如GPS,北斗,伽利略)信号不可信的状态下,通过IMU惯性传感器(加速计+陀螺仪)的数据拟合,给出方向和速度的变化,实现导航功能。IPL(InvenSense Positioning Library)就是整合GPS+惯性传感器(加速计+陀螺仪)等硬件的数据,经过复杂地拟合和策略判断,实时计算最优的定位结果,从而实现定位和导航精度的大幅提升。
图1- InvenSense IPL算法让连续精准导航成为可能
考虑到主流系统的移植性,IPL从设计之初就以库的形式提供,可以非常方便的嵌入到Android系统中,同时此架构也便于未来的Linux等其它系统使用和移植,从而广泛地覆盖手机、车载导航、T-box等各种产品。
匹配地图路网信息,IPL最新版本进一步提升精度
目前,InvenSense已经与中国领先的两家地图供应商达成深度合作,将IPL与地图应用中的路网信息进行匹配(Map Matching),解决了IMU的惯性误差导致的导航路线偏航问题,修正车标短暂停滞,对GPS信号漂移进行改善,从而路网信息下发至客户在使用导航的应用中,用户体验得到进一步提升,并实现地图厂商FLP的业务在手机厂商的落地和差异化。
立足手机,发力新应用,布局未来
经过几代IPL算法在Mate8、Mate9、P9、P10、P10 plus等众多知名旗舰手机上成功地使用和不断提升,辅助导航已经成为毋庸置疑的重要用户体验和最贴心的微创新热点之一,并必将为革命性的室内导航应用奠定坚实的技术基础。同时,InvenSense积极布局多种未来应用,针对可穿戴市场的云应用Coursa Sports和基于位置和用户轨迹提供消费行为分析Coursa Retail 等一系列软件已经在海外初现威力。眼下,IPL已经开始在汽车导航中发挥重要作用,不远的将来当车载导航系统身处隧道中你会听到直接温馨提示:“GPS信号弱,IPL为您指引方向!”
GPS 传感器 陀螺仪 Android Linux 相关文章:
- 移动数字电视相关技术研究(三)(09-24)
- 天线设计面临小尺寸和多天线要求的挑战(11-06)
- GPS产品设计中的几个常见问题及应对之策(02-16)
- GPS产业蕴藏巨大商机 产值将突破100亿大关(10-22)
- GPS接收器架构与设计挑战(02-11)
- 移动GPS:果实终于成熟了(01-22)