嵌入式系统中触摸屏交互功能模块技术设计
时间:12-06
来源:互联网
点击:
本文以ARM920T内核的S3C2410芯片GX开发板为硬件平台,采用 Windows CE操作系统,设计了嵌入式系统触摸屏交互功能模块。并对有关技术问题做了分析与讨论。
1 引言
嵌入式系统拉近了人与计算机的距离,形成一个人机和谐的工作与生活环境。从某一个角度来看,触摸屏作为嵌入式计算机系统中一体化的输入输出设备,在制造工业、过程控制、通讯、仪器、仪表、汽车、船舶、航空、航天、军事装备、消费类产品等方面均得到广泛应用,影响到人类工作与生活的各个领域并极具应用前景,它与嵌入式系统的交互功能的程序设计是整个系统设计的关键。本文描述的这样的设计过程,对其中的技术问题给出了详细的解释。功能设计基于ARM920T内核的S3C2410芯片,以GX开发板为硬件平台,是以 Windows CE为操作系统实现的图文交互界面模块。
2 系统交互功能的设计
2.1 系统构架
通常嵌入式系统的构架可以分成四个部分:处理器、存储器、输入输出(I/O)和软件部分。由于多数嵌入式设备的应用软件和操作系统都是紧密结合的,在这里我们对其不加区分,这也是嵌入式系统和通用PC 系统的最大区别。触摸屏嵌入式设计框图见图一。
图一 触摸屏嵌入式设计框图
2.2 Windows CE的主要功能
它是一个全新开发的模块化的图形用户界面的多任务操作系统,是一个支持多种CPU,拥有良好通信能力的高性能、高效率的实时操作系统。OEM厂家可以加入自己所需要的任何模块,或者除去不需要的。系统中一个应用程序的故障不会引起整个系统失效。
2.3 操作系统对触摸屏的支持
操作系统对触摸屏的支持是按分层的思想进行的。首先是应用层,编写的应用程序调用触摸屏/鼠标事件API(在牵引层有相关的API函数);其次,在驱动层有支持触摸屏的驱动程序。通过统一接口来调用操作系统内核的触摸屏设备驱动程序完成最终的设备控制。从中取出触摸屏的实际坐标值,把该值记录在初始化程序中,当下次有应用程序需要调用触摸屏驱动程序时,触摸屏驱动程序就会去检查初始化程序,读取其中的校正值,并把经过校正,影射后相对坐标值返回该应用程序。
2.4 触摸屏电路
GX开发板为硬件平台,板载SHARP 3.5〞TFT 液晶屏LQ035Q7DB02,320×240,262,144 色,White LED 背光,带触摸屏。SHARP液晶自带四线电阻式触摸屏,可以直接和2410的触摸屏驱动电路连接,触摸位置直接用CPU 内置的ADC 电路采样而得。
图二 板载触摸屏电路
2.5 触摸屏的控制电路
触摸屏的控制是使用FM7843芯片完成的。FM7843是4线电阻触摸屏转换接口芯片。它具有同步串行接口的12位取样模数转换器。在125kHz吞吐速率和2.7V电压下的功耗为750μW,而在关闭模式下的功耗仅为0.5μW。因此,ADS7843以其低功耗和高速率等特性,被广泛应用在采用电池供电的小型手持设备上。FM7843采用SSOP-16引脚封装形式,温度范围是-40"85℃。为了完成一次电极电压切换和A/D转换,需要先通过串口往FM 7843发送控制字,转换完成后再通过串口读出电压转换值。标准的一次转换需要24个时钟周期。由于串口支持双向同时进行传送,并且在一次读数与下一次发控制字之间可以重叠,所以转换速率可以提高到每次16个时钟周期。如果条件允许,CPU可以产生15个CLK的话(比如FPGAs和ASICs),转换速率还可以提高到每次15个时钟周期。FM 7843 通过同步串口与ARM 通讯,可通过SendSIOData()函数(uhal.c)向FM 7843发送数据;通过ReadSIOData()函数(uhal.c)从FM 7843 读出数据。将F 端口的第6 位置0和1,可以打开、关闭FM7843,F 端口的数据寄存器为PDATF(44b.h)。通过外部中断5可以判断是否有触摸动作,查询方式通过宏TCHSCR_IsPenNotDown()(tchscr.h)判断是否有触摸动作。
3.设计中的几个关键问题
3.1 定制Windows CE平台
Windows CE是一个多平台的、可裁减的32位嵌入式操作系统。他既适用于工业设备的嵌入式控智模块,也适用于消费类电子产品的开发。针对不同的目标设备硬件环境,在其内核基础上添加各种模块,从而形成一个定制的嵌入式操作系统。它包括了定制设备所需的一切,例如:联网能力、实时性和小内存占用以及多媒体和Web浏览功能等。
3.2 Windows CE`的驱动模式
Windows CE`设备的驱动模型有两种形式:流接口驱动(Stream Interface Driver)和本地设备驱动(Native Device Driver)从实现方式来看,无论那种驱动都可以采用单层和分层两种方式,多层设备驱动中实现的代码分两层:MDD(Model Device Driver,模型设备驱动)和PDD(Platform Dependent Driver,平台相关驱动)。MDD层中向GWES模块提供了DDI(Device Driver Interface,设备驱动接口)函数接口,实现了对于同一类设备的驱动程序所公用的功能,而PDD则实现了与平台的具体硬件设备相关的代码。MDD通过调用特殊的PDD函数来访问硬件。
3.3 触摸屏与显示器的配合算法
FM 7843 送回控制器的X 与Y 值仅是对当前触摸点的电压值的A/D 转换值,它不具有实用价值。这个值的大小不但与触摸屏的分辨率有关,而且也与触摸屏与LCD 贴合的情况有关。而且,LCD 分辨率与触摸屏的分辨率一般来说是不一样,坐标也不一样,因此,如果想得到体现LCD 坐标的触摸屏位置,还需要在程序中进行转换。转换公式如下:
x=(x-TchScr_Xmin)*LCDWIDTH/(TchScr_Xmax-TchScr_Xmin)
y=(y-TchScr_Ymin)*LCDHEIGHT/(TchScr_Ymax-TchScr_Ymin)
其中,TchScr_Xmax、TchScr_Xmin、TchScr_Ymax 和TchScr_Ymin 是触摸屏返回电压值x、y 轴的范围, LCDWIDTH、LCDHEIGHT 是液晶屏的宽度与高度。
3.4 操作系统对触摸屏的支持
操作系统对触摸屏的支持是按分层的思想进行的。首先是应用层,编写的应用程序调用触摸屏/鼠标事件API(在牵引层有相关的API函数);其次,在驱动层有支持触摸屏的驱动程序。通过统一接口来调用操作系统内核的触摸屏设备驱动程序完成最终的设备控制。从中取出触摸屏的实际坐标值,把该值记录在初始化程序中,当下次有应用程序需要调用触摸屏驱动程序时,触摸屏驱动程序就会去检查初始化程序,读取其中的校正值,并把经过校正,影射后相对坐标值返回该应用程序。
3.5 触摸屏的坐标的确认
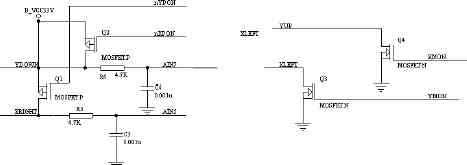
通过上述方式采集的坐标是相对于触摸屏的坐标,需要转换成为LCD 坐标,这个过程之前需要进行两种坐标的校准工作,这里采用取平均值法。首先从触摸屏的4个顶角得到2个最大值和2个最小值,分别计为x_min,y_min 和x_max,y_max。X,Y 方向的确定如表1 所示。
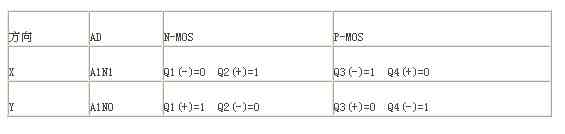
当系统处于休眠状态时,Q1,Q3 和Q4 处于截止状态,Q2 导通。当触摸屏被按下时,首先导通MOS 管组Q1 和Q4,X+与X-回路加上+3.3V 电源,同时将MOS 管组Q2 和Q3 关闭,断开Y+和Y-,再启动处理器的A/D 转换通道1(AIN1),电路电阻与触摸屏按下产生的电阻输出分量电压,并由A/D 转换器将电压值数字化,计算X 轴的坐标。接着先导通MOS 管组Q2 和Q3,Y+与Y-回路加上+3.3V 电源,同时将MOS 管组Q1和Q4 关闭,断开X+和X-,再启动处理器的A/D 转换通道0(AIN0),电路电阻与触摸屏按下产生的电阻输出分量电压,并由A/D 转换器将电压值数字化,计算Y 轴的坐标。系统读到坐标值后,关闭Q1、Q3 和Q4,打开Q2,回到初始状态,等待下一次笔触。
确定X,Y 方向后,坐标值的计算公式如下:
X=(x_max-Xa)×320 /(x_max - x_min)
Y=(y_max- Ya)×240 /(y_max- y_min)
式中:
Xa=(X1+X2+...+Xn)/ n
Ya=(Y1+Y2+...+Yn)/ n
一般触摸屏将触摸时的X、Y 方向的电压值送到A/D 转换接口,经过A/D 转换后的X与Y 值仅是对当前触摸点的电压值的A/D 转换值,它不具有实用价值。这个值的大小不但与触摸屏的分辨率有关,而且与触摸屏与LCD 贴合的情况有关。如果想得到体现LCD 坐标的触摸屏位置,还需要在程序中进行转换。
4.结论
嵌入式系统的PDA越来越多的使用触摸屏做输入输出设备。本文以ARM920T内核的S3C2410芯片GX开发板为硬件平台,设计了嵌入式系统触摸屏交互功能模块,在全国大学生嵌入式系统竞赛的产品和作品中已多次应用。文中并对设计中的关键技术问题做了详细的分析与讨论。软件设计流程图和源代码及其它辅助程序等限于篇幅另文介绍。
本文作者创新点:
1.在S3C2410芯片GX开发环境下设计了嵌入式系统触摸屏交互功能模块。
2.编制了嵌入式系统触摸屏交互功能模块程序及辅助接口程序并对有关技术问题做了分析。
1 引言
嵌入式系统拉近了人与计算机的距离,形成一个人机和谐的工作与生活环境。从某一个角度来看,触摸屏作为嵌入式计算机系统中一体化的输入输出设备,在制造工业、过程控制、通讯、仪器、仪表、汽车、船舶、航空、航天、军事装备、消费类产品等方面均得到广泛应用,影响到人类工作与生活的各个领域并极具应用前景,它与嵌入式系统的交互功能的程序设计是整个系统设计的关键。本文描述的这样的设计过程,对其中的技术问题给出了详细的解释。功能设计基于ARM920T内核的S3C2410芯片,以GX开发板为硬件平台,是以 Windows CE为操作系统实现的图文交互界面模块。
2 系统交互功能的设计
2.1 系统构架
通常嵌入式系统的构架可以分成四个部分:处理器、存储器、输入输出(I/O)和软件部分。由于多数嵌入式设备的应用软件和操作系统都是紧密结合的,在这里我们对其不加区分,这也是嵌入式系统和通用PC 系统的最大区别。触摸屏嵌入式设计框图见图一。
图一 触摸屏嵌入式设计框图
2.2 Windows CE的主要功能
它是一个全新开发的模块化的图形用户界面的多任务操作系统,是一个支持多种CPU,拥有良好通信能力的高性能、高效率的实时操作系统。OEM厂家可以加入自己所需要的任何模块,或者除去不需要的。系统中一个应用程序的故障不会引起整个系统失效。
2.3 操作系统对触摸屏的支持
操作系统对触摸屏的支持是按分层的思想进行的。首先是应用层,编写的应用程序调用触摸屏/鼠标事件API(在牵引层有相关的API函数);其次,在驱动层有支持触摸屏的驱动程序。通过统一接口来调用操作系统内核的触摸屏设备驱动程序完成最终的设备控制。从中取出触摸屏的实际坐标值,把该值记录在初始化程序中,当下次有应用程序需要调用触摸屏驱动程序时,触摸屏驱动程序就会去检查初始化程序,读取其中的校正值,并把经过校正,影射后相对坐标值返回该应用程序。
2.4 触摸屏电路
GX开发板为硬件平台,板载SHARP 3.5〞TFT 液晶屏LQ035Q7DB02,320×240,262,144 色,White LED 背光,带触摸屏。SHARP液晶自带四线电阻式触摸屏,可以直接和2410的触摸屏驱动电路连接,触摸位置直接用CPU 内置的ADC 电路采样而得。
图二 板载触摸屏电路
2.5 触摸屏的控制电路
触摸屏的控制是使用FM7843芯片完成的。FM7843是4线电阻触摸屏转换接口芯片。它具有同步串行接口的12位取样模数转换器。在125kHz吞吐速率和2.7V电压下的功耗为750μW,而在关闭模式下的功耗仅为0.5μW。因此,ADS7843以其低功耗和高速率等特性,被广泛应用在采用电池供电的小型手持设备上。FM7843采用SSOP-16引脚封装形式,温度范围是-40"85℃。为了完成一次电极电压切换和A/D转换,需要先通过串口往FM 7843发送控制字,转换完成后再通过串口读出电压转换值。标准的一次转换需要24个时钟周期。由于串口支持双向同时进行传送,并且在一次读数与下一次发控制字之间可以重叠,所以转换速率可以提高到每次16个时钟周期。如果条件允许,CPU可以产生15个CLK的话(比如FPGAs和ASICs),转换速率还可以提高到每次15个时钟周期。FM 7843 通过同步串口与ARM 通讯,可通过SendSIOData()函数(uhal.c)向FM 7843发送数据;通过ReadSIOData()函数(uhal.c)从FM 7843 读出数据。将F 端口的第6 位置0和1,可以打开、关闭FM7843,F 端口的数据寄存器为PDATF(44b.h)。通过外部中断5可以判断是否有触摸动作,查询方式通过宏TCHSCR_IsPenNotDown()(tchscr.h)判断是否有触摸动作。
3.设计中的几个关键问题
3.1 定制Windows CE平台
Windows CE是一个多平台的、可裁减的32位嵌入式操作系统。他既适用于工业设备的嵌入式控智模块,也适用于消费类电子产品的开发。针对不同的目标设备硬件环境,在其内核基础上添加各种模块,从而形成一个定制的嵌入式操作系统。它包括了定制设备所需的一切,例如:联网能力、实时性和小内存占用以及多媒体和Web浏览功能等。
3.2 Windows CE`的驱动模式
Windows CE`设备的驱动模型有两种形式:流接口驱动(Stream Interface Driver)和本地设备驱动(Native Device Driver)从实现方式来看,无论那种驱动都可以采用单层和分层两种方式,多层设备驱动中实现的代码分两层:MDD(Model Device Driver,模型设备驱动)和PDD(Platform Dependent Driver,平台相关驱动)。MDD层中向GWES模块提供了DDI(Device Driver Interface,设备驱动接口)函数接口,实现了对于同一类设备的驱动程序所公用的功能,而PDD则实现了与平台的具体硬件设备相关的代码。MDD通过调用特殊的PDD函数来访问硬件。
3.3 触摸屏与显示器的配合算法
FM 7843 送回控制器的X 与Y 值仅是对当前触摸点的电压值的A/D 转换值,它不具有实用价值。这个值的大小不但与触摸屏的分辨率有关,而且也与触摸屏与LCD 贴合的情况有关。而且,LCD 分辨率与触摸屏的分辨率一般来说是不一样,坐标也不一样,因此,如果想得到体现LCD 坐标的触摸屏位置,还需要在程序中进行转换。转换公式如下:
x=(x-TchScr_Xmin)*LCDWIDTH/(TchScr_Xmax-TchScr_Xmin)
y=(y-TchScr_Ymin)*LCDHEIGHT/(TchScr_Ymax-TchScr_Ymin)
其中,TchScr_Xmax、TchScr_Xmin、TchScr_Ymax 和TchScr_Ymin 是触摸屏返回电压值x、y 轴的范围, LCDWIDTH、LCDHEIGHT 是液晶屏的宽度与高度。
3.4 操作系统对触摸屏的支持
操作系统对触摸屏的支持是按分层的思想进行的。首先是应用层,编写的应用程序调用触摸屏/鼠标事件API(在牵引层有相关的API函数);其次,在驱动层有支持触摸屏的驱动程序。通过统一接口来调用操作系统内核的触摸屏设备驱动程序完成最终的设备控制。从中取出触摸屏的实际坐标值,把该值记录在初始化程序中,当下次有应用程序需要调用触摸屏驱动程序时,触摸屏驱动程序就会去检查初始化程序,读取其中的校正值,并把经过校正,影射后相对坐标值返回该应用程序。
3.5 触摸屏的坐标的确认
通过上述方式采集的坐标是相对于触摸屏的坐标,需要转换成为LCD 坐标,这个过程之前需要进行两种坐标的校准工作,这里采用取平均值法。首先从触摸屏的4个顶角得到2个最大值和2个最小值,分别计为x_min,y_min 和x_max,y_max。X,Y 方向的确定如表1 所示。
当系统处于休眠状态时,Q1,Q3 和Q4 处于截止状态,Q2 导通。当触摸屏被按下时,首先导通MOS 管组Q1 和Q4,X+与X-回路加上+3.3V 电源,同时将MOS 管组Q2 和Q3 关闭,断开Y+和Y-,再启动处理器的A/D 转换通道1(AIN1),电路电阻与触摸屏按下产生的电阻输出分量电压,并由A/D 转换器将电压值数字化,计算X 轴的坐标。接着先导通MOS 管组Q2 和Q3,Y+与Y-回路加上+3.3V 电源,同时将MOS 管组Q1和Q4 关闭,断开X+和X-,再启动处理器的A/D 转换通道0(AIN0),电路电阻与触摸屏按下产生的电阻输出分量电压,并由A/D 转换器将电压值数字化,计算Y 轴的坐标。系统读到坐标值后,关闭Q1、Q3 和Q4,打开Q2,回到初始状态,等待下一次笔触。
确定X,Y 方向后,坐标值的计算公式如下:
X=(x_max-Xa)×320 /(x_max - x_min)
Y=(y_max- Ya)×240 /(y_max- y_min)
式中:
Xa=(X1+X2+...+Xn)/ n
Ya=(Y1+Y2+...+Yn)/ n
一般触摸屏将触摸时的X、Y 方向的电压值送到A/D 转换接口,经过A/D 转换后的X与Y 值仅是对当前触摸点的电压值的A/D 转换值,它不具有实用价值。这个值的大小不但与触摸屏的分辨率有关,而且与触摸屏与LCD 贴合的情况有关。如果想得到体现LCD 坐标的触摸屏位置,还需要在程序中进行转换。
4.结论
嵌入式系统的PDA越来越多的使用触摸屏做输入输出设备。本文以ARM920T内核的S3C2410芯片GX开发板为硬件平台,设计了嵌入式系统触摸屏交互功能模块,在全国大学生嵌入式系统竞赛的产品和作品中已多次应用。文中并对设计中的关键技术问题做了详细的分析与讨论。软件设计流程图和源代码及其它辅助程序等限于篇幅另文介绍。
本文作者创新点:
1.在S3C2410芯片GX开发环境下设计了嵌入式系统触摸屏交互功能模块。
2.编制了嵌入式系统触摸屏交互功能模块程序及辅助接口程序并对有关技术问题做了分析。
ARM S3C2410 嵌入式 触摸屏 电路 LED 电阻 ADC 电压 FPGA 电子 显示器 LCD IDT 相关文章:
- 数字电视条件接收卡SoC SM1658的硬件结构及实现方法(下)(09-07)
- 基于USB的通用无线传输接口设计(09-20)
- 用IXP网络处理器设计的数字家庭媒体中心系统 (02-12)
- 带有 DRM 功能的 Nexperia Flash 媒体播放器(02-15)
- ARM9平台下的CMOS图像传感器数据采集系统(07-20)
- 基于ARM的智能家居远程控制系统设计 (10-15)