GPS 接收器测试
时间:06-21
来源:互联网
点击:
Off-The-Air GPS
以「Off-the-air」方式量测接收器的 TTFF 时,即是将接收器直接连至天线达到最不精确的方式。由于此量测作业可针对已记录与仿真的 GPS 讯号,进而校准自动化量测作业,因此亦具有一定的重要性。除此之外,亦可针对 SIRFstar III 芯片组进行程序设计,让接收器进入冷启动模式,且以接收器所得到的 TTFF 值进行所有量测作业。请注意,GPS 接收器一般指定为 32.6 秒的冷启动 TTFF 时间。在我们的量测作业中,则得到下列结果:

图 19.「Off-the-air」GPS 讯号的 TTFF 与最大 C/N 比值
根据初始的 「Off-the-air」结果,则可发现 GPS 接收器在标准的 3 秒误差内,可达到 33.2 秒的 TTFF。这些量测结果均位于 TTFF 规格的容错范围内。而更重要的,即是可透过仿真与记录的 GPS 数据,进而比较量测结果与实际结果。
根据上列线性误差等式,即可计算各次量测的线性标准误差。

图 20. 由「Off-the-air」GPS 讯号所得的 LLA
请注意,若要将「Off-the-air」GPS 讯号、仿真讯号,与播放讯号进行相关,则必须先进行「Off-the-air」讯号功率的相关性。当进行 TTFF 与定位精确度量测时,RF 功率强度基本上不太会影响到结果。因此,必须比对「Off-the-air」、仿真,与记录 GPS 讯号的 C/N 比值,即可进行 RF 功率的相关性作业。
已记录的 GPS 讯号
虽然可透过实时讯号量测 TTFF 与定位误差,但是这些量测作业往往不可重复;如同卫星均持续环绕地球运行,而非固定不动。进行可重复 TTFF 与定位精确度的量测方式之一,即是使用已记录的 GPS 讯号。此章节将接着说明应如何透过已记录的 GPS 讯号,以进行实时 GPS 讯号的相关作业。
已记录的 GPS 讯号,可透过 RF 向量讯号产生器再次产生。由于必须播放讯号,则校准 RF 功率强度最简单的方法,即是比对实时与记录的 C/N 值。当获得「Off-the-air」讯号时,则可发现所有实时讯号的 C/N 峰值均约为 47 ~ 49 dB-Hz 之间。
而播放讯号的功率强度,亦可达到与实时讯号相同的 C/N 值,进而确定其所得的 TTFF 与位置精确度,将可与实时讯号产生相关。在下图 21 中,我们使用的星期时间 (TOW) 值与实时「Off-the-air」讯号的 TOW 相近,而在 4 次不同的实验下得到 TTFF 结果。

图 21. 由「Off-the-air」GPS 讯号所得的 TTFF
除了量测首次定位时间之外,亦可量测 GPS 接收器所取得的经度、纬度,与高度信息。下图显示相关结果。

图 22. 由「Off-the-air」GPS 讯号所得的 LLA
从图 21 与 22 中可注意到,其实透过已记录的 GPS 讯号,即可得到合理的可重复 TTFF 与 LLA (Latitude、Longitude、Altitude) 结果。然而,由于这些量测作业的错误与标准误差,仅稍微高于「Off-the-air」量测的误差,因此几乎可将之忽略。因为绝对精确度 (Absolute accuracy) 较高,所以可重复性亦较优于「Off-the-air」量测作业。
仿真的 GPS 讯号
最后 1 种可进行 TTFF 与定位精确度量测的 GPS 测试讯号来源,即为仿真的多组卫星 GPS 讯号。透过 NI LabVIEW GPS 工具组,即可透过由使用者定义的 TOW、星期数,与接收器位置,仿真最多 12 组卫星。此 GPS 讯号仿真方式的主要优点,即是透过可能的最佳讯噪比 (SNR) 构成 GPS 讯号。与实时/记录的 GPS 讯号不同,依此种方法所建立的可重复讯号,其噪声功率甚小。图 23 即呈现了仿真多组卫星讯号的频域。
VSA 设定
Center: 1.57542 GHZz
Span: 4 MHz
RBW: 100 Hz
Averaging: RMS, 20 Average

图 23. 仿真多组卫星 GPS 讯号的带内功率 (Power-in-band) 量测作业
当透过仿真的多组卫星波形测试接收器时,则可针对接收器所提供的 C/N 比值进行关联,以再次评估所需的 RF 功率。
一旦能为 RF 功率强度进行关联,则可接着量测 TTFF。当量测 TTFF 时,应先启动 RF 向量讯号产生器。过了 5 秒钟之后,可手动将接收器转为「冷」开机模式。一旦接收器取得定位信息,则将回报 TTFF 信息。下图则呈现仿真 GPS 讯号的相关结果:
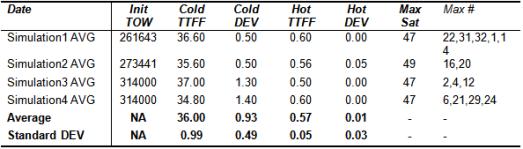
图 24. TTFF 数值的 4 项专属模拟
请注意图 24 中的所有仿真作业均使用相同的 LLA (Latitudes、Longitude,与 Altitude)。
此外,若要量测 TTFF,我们亦可依不同的 TOW 建立仿真作业,以计算 LLA 的精确度与可重复性。请注意,由于在数个小时之内,可用的卫星讯号将持续变化,因此必须设定多种 TOW 以测试精确度 (如图 24)。而图 25 则表示其 LLA 信息。
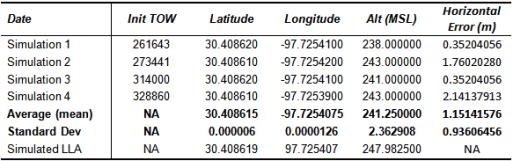
图 25. 多项 TOW 仿真作业的水平精确度
在图 25 中,可根据模拟的定位,计算出公尺为单位的水平错误。又如图 20 所示,可透过下列等式找出错误:

等式 17. 仿真 GPS 讯号的定位错误
而针对我们所使用的接收器而言,其水平定位最大误差为 5.2 公尺,水平定位平均误差为 1.5 公尺。而透过图 18 所示,我们所使用的接收器均可达指定的限制之内。
如先前所述,接收器的精确度,与可用的卫星讯号密不可分。也就是说,接收器的精确度可能在数个小时内大幅变化 (卫星讯号改变),但是其可重复性却极小。为了确认我们的 GPS 接收器亦为如此,则可针对特定的模拟 GPS 波形执行多项测试。此项作业主要是必须确认,RF 仪控并不会对仿真的 GPS 讯号产生额外的不确定性。如下方图 26 所示,当重复使用相同的二进制档案时,我们所使用的 GPS 接收器将得到极高可重复性的量测。

图 26. 相同波形的各次测试,其误差亦具有极高的可重复性
回头再看图 20,使用仿真 GPS 讯号的最大优点之一,即是可达到可重复的定位结果。由于此特性可让我们确认:所回报的定位信息,并不会因为设计迭代 (Iteration) 而发生变化,因此在开发的设计检验阶段中,此特性格外重要。
以「Off-the-air」方式量测接收器的 TTFF 时,即是将接收器直接连至天线达到最不精确的方式。由于此量测作业可针对已记录与仿真的 GPS 讯号,进而校准自动化量测作业,因此亦具有一定的重要性。除此之外,亦可针对 SIRFstar III 芯片组进行程序设计,让接收器进入冷启动模式,且以接收器所得到的 TTFF 值进行所有量测作业。请注意,GPS 接收器一般指定为 32.6 秒的冷启动 TTFF 时间。在我们的量测作业中,则得到下列结果:
图 19.「Off-the-air」GPS 讯号的 TTFF 与最大 C/N 比值
根据初始的 「Off-the-air」结果,则可发现 GPS 接收器在标准的 3 秒误差内,可达到 33.2 秒的 TTFF。这些量测结果均位于 TTFF 规格的容错范围内。而更重要的,即是可透过仿真与记录的 GPS 数据,进而比较量测结果与实际结果。
根据上列线性误差等式,即可计算各次量测的线性标准误差。
图 20. 由「Off-the-air」GPS 讯号所得的 LLA
请注意,若要将「Off-the-air」GPS 讯号、仿真讯号,与播放讯号进行相关,则必须先进行「Off-the-air」讯号功率的相关性。当进行 TTFF 与定位精确度量测时,RF 功率强度基本上不太会影响到结果。因此,必须比对「Off-the-air」、仿真,与记录 GPS 讯号的 C/N 比值,即可进行 RF 功率的相关性作业。
已记录的 GPS 讯号
虽然可透过实时讯号量测 TTFF 与定位误差,但是这些量测作业往往不可重复;如同卫星均持续环绕地球运行,而非固定不动。进行可重复 TTFF 与定位精确度的量测方式之一,即是使用已记录的 GPS 讯号。此章节将接着说明应如何透过已记录的 GPS 讯号,以进行实时 GPS 讯号的相关作业。
已记录的 GPS 讯号,可透过 RF 向量讯号产生器再次产生。由于必须播放讯号,则校准 RF 功率强度最简单的方法,即是比对实时与记录的 C/N 值。当获得「Off-the-air」讯号时,则可发现所有实时讯号的 C/N 峰值均约为 47 ~ 49 dB-Hz 之间。
而播放讯号的功率强度,亦可达到与实时讯号相同的 C/N 值,进而确定其所得的 TTFF 与位置精确度,将可与实时讯号产生相关。在下图 21 中,我们使用的星期时间 (TOW) 值与实时「Off-the-air」讯号的 TOW 相近,而在 4 次不同的实验下得到 TTFF 结果。
图 21. 由「Off-the-air」GPS 讯号所得的 TTFF
除了量测首次定位时间之外,亦可量测 GPS 接收器所取得的经度、纬度,与高度信息。下图显示相关结果。
图 22. 由「Off-the-air」GPS 讯号所得的 LLA
从图 21 与 22 中可注意到,其实透过已记录的 GPS 讯号,即可得到合理的可重复 TTFF 与 LLA (Latitude、Longitude、Altitude) 结果。然而,由于这些量测作业的错误与标准误差,仅稍微高于「Off-the-air」量测的误差,因此几乎可将之忽略。因为绝对精确度 (Absolute accuracy) 较高,所以可重复性亦较优于「Off-the-air」量测作业。
仿真的 GPS 讯号
最后 1 种可进行 TTFF 与定位精确度量测的 GPS 测试讯号来源,即为仿真的多组卫星 GPS 讯号。透过 NI LabVIEW GPS 工具组,即可透过由使用者定义的 TOW、星期数,与接收器位置,仿真最多 12 组卫星。此 GPS 讯号仿真方式的主要优点,即是透过可能的最佳讯噪比 (SNR) 构成 GPS 讯号。与实时/记录的 GPS 讯号不同,依此种方法所建立的可重复讯号,其噪声功率甚小。图 23 即呈现了仿真多组卫星讯号的频域。
VSA 设定
Center: 1.57542 GHZz
Span: 4 MHz
RBW: 100 Hz
Averaging: RMS, 20 Average
图 23. 仿真多组卫星 GPS 讯号的带内功率 (Power-in-band) 量测作业
当透过仿真的多组卫星波形测试接收器时,则可针对接收器所提供的 C/N 比值进行关联,以再次评估所需的 RF 功率。
一旦能为 RF 功率强度进行关联,则可接着量测 TTFF。当量测 TTFF 时,应先启动 RF 向量讯号产生器。过了 5 秒钟之后,可手动将接收器转为「冷」开机模式。一旦接收器取得定位信息,则将回报 TTFF 信息。下图则呈现仿真 GPS 讯号的相关结果:
图 24. TTFF 数值的 4 项专属模拟
请注意图 24 中的所有仿真作业均使用相同的 LLA (Latitudes、Longitude,与 Altitude)。
此外,若要量测 TTFF,我们亦可依不同的 TOW 建立仿真作业,以计算 LLA 的精确度与可重复性。请注意,由于在数个小时之内,可用的卫星讯号将持续变化,因此必须设定多种 TOW 以测试精确度 (如图 24)。而图 25 则表示其 LLA 信息。
图 25. 多项 TOW 仿真作业的水平精确度
在图 25 中,可根据模拟的定位,计算出公尺为单位的水平错误。又如图 20 所示,可透过下列等式找出错误:
等式 17. 仿真 GPS 讯号的定位错误
而针对我们所使用的接收器而言,其水平定位最大误差为 5.2 公尺,水平定位平均误差为 1.5 公尺。而透过图 18 所示,我们所使用的接收器均可达指定的限制之内。
如先前所述,接收器的精确度,与可用的卫星讯号密不可分。也就是说,接收器的精确度可能在数个小时内大幅变化 (卫星讯号改变),但是其可重复性却极小。为了确认我们的 GPS 接收器亦为如此,则可针对特定的模拟 GPS 波形执行多项测试。此项作业主要是必须确认,RF 仪控并不会对仿真的 GPS 讯号产生额外的不确定性。如下方图 26 所示,当重复使用相同的二进制档案时,我们所使用的 GPS 接收器将得到极高可重复性的量测。
图 26. 相同波形的各次测试,其误差亦具有极高的可重复性
回头再看图 20,使用仿真 GPS 讯号的最大优点之一,即是可达到可重复的定位结果。由于此特性可让我们确认:所回报的定位信息,并不会因为设计迭代 (Iteration) 而发生变化,因此在开发的设计检验阶段中,此特性格外重要。
GPS 仿真 总线 PXI 无线电 LabVIEW USB 放大器 滤波器 电压 收发器 自动化 Atmel 相关文章:
- 基于GPS的电压向量测量的新方法及其应用(10-30)
- GPS测量误差(10-09)
- 欧洲伽利略计划使用Pendulum时间/频率方案(11-03)
- 如何降低GPS测试成本(11-26)
- 可检测差分GPS校正信号的窄频移数字鉴别器电路(04-12)
- 基于RS485总线的自动化检测系统的研制(04-15)