全面认知3D视频——从技术概念到监测与测量
很奇怪了,叠加不上。一般来说背景可以左右眼之间有差异,但运动的物体要确保落在左右摄像机拍摄的区域之内。
另一种是垂直摄像机的摆放, 3D左眼信号直接进入摄像机,右眼通过分光镜分过来,分过来的时候是倒像的,需要利用旋转电路把它翻过来,因为电路之间处理的不一样,要确保拍的图像时间一致,如果时间上差了一帧或者两帧,最后出来的画面就完全乱掉了。曾经有一篇文章说明了为什么要垂直的,因为水平的话由于两个机器本身的尺寸太大,很难保证它们之间的距离是60-65毫米,因为机器比较宽,用垂直的方式可以很好的调整左右摄像机之间的间距。
摄像机水平和垂直都会有角度的问题,到底是并行拍还是用扩散的方式来做?并行可以很好的保证水平方向,但是有一个问题:人看东西一般来说有汇聚点,如果前期并行拍,后期制作的时候可以汇聚,调整之间的画面,汇聚会比较难,要算拍的位置跟摄像机的距离,需要把它定位到画面是朝屏幕外还是朝里,会有很多的计算在里面,比较麻烦。
所谓的3D是视差产生的左右位移,最后才会有3D的效果出来。视差有四种(见下图):零视差,左眼和右眼看到的距离一样;正视差是右眼在左眼之前,一般画面在屏幕的后面;负视差是右眼看到的画面在左眼的左边,负视差看到的画面应该是在屏幕的前方;正常的两眼不能有分散的视觉,要避免拍的时候出现散的视差状况出现。零视差一般是电影或者电视的屏幕,到底哪个算屏幕?零视差的点就是电影屏幕和电视的屏幕,如果画面要出屏得以这个为参考,入屏也得以这个为参考。正视差是右眼在左眼的右边,它的点落在屏幕的后方,画面呈现出来的效果是在屏幕的后面位置。负视差画面是在零视差定义的屏幕前方,右眼看的画面是在左眼的左方,物体全在屏幕的外面,会产生悬空的感觉,朝视觉方向飞过来。分散的视差人眼不会散开,真正拍的话不会有这种画面出来。
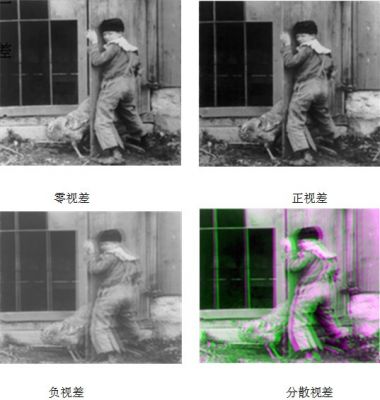
图2:四种不同类型的视差效果。
拍的时候会有一个平面轴,所谓的负视差我们建议往眼睛这边飞过来的时候不要太靠眼睛,如果突然一个子弹打过来,如果打的太靠近对人的眼睛适应性不是很好,画面到哪个位置比较合适?有些研究说到手臂长的位置是比较合适的负视差,但不能为了追求效果汇聚点非常多,这样效果不一定好,分散的地方也不需要太大,目前大家都只是在做研究课题,还没有标准的定义到底什么样的范围我们能接受,这里会有很多的实验,包括数据。
因为是两台摄像机拍,要保证之间的亮度和色度是一致,如果有一定的差异,看起来也很难受。看的时候要把左眼和右眼叠加在一起,到底我们能允许多少垂直上的色差、亮度跟色度的差异?虽然我们有很多的软件和工具保证两个摄像机之间的光圈和对焦,但不可能保证完全一致,目前没有很权威的标准来定义到底多大范围可以接受。如果左眼跟右眼没有完全分开,即虽然是左眼的信息,但也可以看到右眼的东西,这会对我们的视觉造成很混乱的效果,会产生非常难受的感觉。
定一个零视差的屏,如果拍的时候总转换视差屏,对我们的冲击也很大。不建议大家变化零视差,同一个场景零视差的屏应该是固定的,不能同样一个产品变来变去,眼睛要不断地调节焦距对焦,眼睛会很累。如果变化的话,建议从一个屏面过渡到另一个屏面的时候最好是2D的,在另一个屏面上再建立立体的感觉,这样人的眼睛会有适应的过程,看起来就不会特别难受,不要在同一类场景中变化零视差屏。
3D视频监视和测量
对3D拍出来的亮度、色度、焦距的测试,泰克也有些相关的解决方案。如果左右两个画面亮度差异很大,大家看3D效果会非常糟糕。利用棋盘的检验方式,可以很轻易的看到左右眼之间的画面亮度有多大差别,如果亮度和色度差别不大,左右不会有很大的过渡,亮度和色度看起来会有比较平滑的感觉,通过调光圈和灯光,确保亮度和色度在同样的范围之内。下图是左右眼的图像误差示意图,右边因为视差的关系阳光透进来,如果把两个画面合成3D效果看起来就很别扭,如果做二维拍摄光晕不允许,3D拍的时候也要避免这种效果出来,左边没有太阳,右边有太阳,这样合成画面的话会有非常大的问题。从测试波形可以看出,右眼亮度明显比左眼高,要调节光圈,不要出现光晕的现象。

图3:左眼和右眼的图像误差:亮度电平不同,色彩不同。

图4:利用泰克WFM8300进行视频电平调整。
两个镜头要同时调,如果它们之间的焦距或者光圈不一样,出来的画面也是非常糟糕的,通过左眼减右眼的效果,会有一定的差,这个是正确的,我们希望看到的立体感觉,本身左眼和
- 基于VRML的虚拟机房的设计与实现(06-07)
- 直升机虚拟仪表DLL设计与实现(05-21)
- 3D数模的CMM曲面检测技术(08-07)
- 什么是光学影像测量仪(10-09)
- 3D集成系统的测试挑战(05-04)
- 安捷伦展示3D-EM软件版本整合电路设计流程(05-27)