遥控LED广告牌
2.3接收机和显示模块
接收机和显示模块由接收器、译码器、单片机、显示驱动、LED屏及供电系统组成,其结构框图如图4所示。 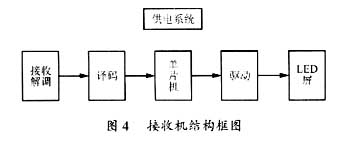
接收器将接收到的高频信号经放大整形后解调出数字编码信号。我们选用了与发射模块相对应的接收解调一体化模块。该系列模块采用超外差、二次变频技术,并将所有的射频接收、混频、滤波、数据解调、放大整形电路全部集成在模块内,功能高度集成化,免去射频频率调试及超再生接收电路的不稳定性,具有可靠性高、频率稳定、接收频率免调试等特点。
译码器将数字编码信号译码,再并行输出给单片机。我们选用的是与编码相对应的码分多址串行解码专用芯片。
单片机负责接收数据的识别、保存、显示方式转换。单片机选用了ATMEL公司的89S52,通用性好,性价比高。
显示模块用于显示广告信息。该模块包括LED显示屏和显示驱动板,自带显示缓冲区,并以动态扫描方式驱动LED显示屏,具有功耗低、亮度大等特点。
接收显示系统的供电电源没有特殊要求,但要留有相当裕量并注意通风散热,因为,很多LED广告牌引起的火灾都是由于供电系统造成的。
3 软件结构
本系统的软件主要由三大模块组成,即上位机主控程序、发射机主控程序和接收机主控程序。
3.1上位机主控程序
上位机主控程序实际上包括显示信息生成程序、显示点阵转换程序和串口通信程序,是三大主控程序中结构最复杂的一部分。
显示信息生成程序完成显示图像和文字的录入、编辑及动画效果设计。该程序首先采用DOS平台下的主控程序与底层通信软件结合,通过串行及并行通信口完成用户对源文件、INTERNET接口及其他输入设备的多参数录入。在此基础上用Visual C++语言设计了主控软件,生成动画,并通过界面和对话框的形式实现了对整个上位机系统的可视化控制。
显示点阵转换程序就是将生成的显示信息通过点阵抽取和移动算法将显示信息转换为LED显示屏对应的点阵数据。对于彩色显示屏,需要将图像信息的RGB三基色数据分别抽样,并分块存储、顺序转发;对于连续的动画图像,要按帧分别计算偏移量,关键是背景图像与动画文字要同步。该部分的软件是在TURBO C3.0的环境下编写的。
串口通信程序则较为简单,附属于点阵转换程序中。
限于篇幅和技术原因,这里仅以PC机汉字抽取发送程序为例,叙述其原理和结构。
设终端显示屏所显示的是16×16的汉字点阵。所以,要想在终端上显示广告信息,必须将该信息所包含的汉字的点阵数据传到终端上。在TURBO C3.0 中,将汉字赋值给一个变量时,实际上是将该汉字的区位码赋值给这个变量。通过用UltraEdit-32以二进制的形式,观察DOS的汉字库文件chs16.fon,发现汉字是以点阵的形式存储的。每个汉字都是16×16的点阵,笔划经过的地方为"1",其余为"0"。这样,按从上到下,从左到右的顺序,一个汉字由256个点组成,也就是32个字节。汉字按区位码的顺序排列在汉字字库中,区码为行,位码为列,一区有94位。这样,某汉字在汉字库中的偏移地址为(区码×94+位码)×32。取出后的32字节汉字点阵,经由PC机的串行口送入到发射机中。其流程如图5所示。 
3.2 发射机主控程序
发射机主控软件的功能是通过串行口接收上位PC机发送来的图像点阵,读取键盘命令,并向编码器串行发送操作命令或显示数据。
该部分的软件是在Keil C51环境下编写的,它可以将C语言直接翻译成汇编语言,生成二进制码写入单片机,这样编写效率高一些。
程序是依靠中断方式来工作的,开机后等待串行口和INT0的触发。当串行口触发,则表明PC机有图像点阵数据传来,单片机立即接收点阵数据存于RAM中;当INT0触发,表明键盘有动作,立即接收键值判断命令的类别,并向接收机发送图像点阵数据或者操作命令。其功能流程如图6所示。

3.3 接收机主控程序
该部分软件的功能是完成对接收数据的识别、存储、变换和显示驱动,并可实现本地本机的自检,显示固化图像。当接收装置的译码芯片有输出时,单片机就中断当前的显示,接收标志字,然后判断此标志字的内容,确定将接收的是图像点阵,还是操作控制命令。若是点阵数据,就将其连续接收存放到一个显示缓冲数据库中,按当前的方式显示。若是命令,则立刻改变显示方式。
其中,关键的是图像上、下、左、右移动的实时实现。具体实现方法如下:
1)图像的上下移动 将一图像点阵中的上一行数据赋给BUF[16][4]中对应的下一行,直到一个图像的移完为止;再移下一个图像的点阵。上移的过程类似。
2)图像的左右移动 将一图像的每一行数据向左移位(使用C语言的移位指令),将移位后的点阵存放于BUF之中,即可显示。右移的过程类似。
接收机主控程序的功能流程如图7所示。

LED 相关文章:
- OLED显示器及其馈电技术(08-13)
- 基于S3C44B0X的大型LED显示系统设计(08-14)
- 利用EL7516制作高效、高电流的白光LED驱动器(08-14)
- OLED显示模块与C8051F单片机的接口设计(08-14)
- 白光型发光二极管(WLED)之背光设计兵法(08-26)
- LCD和OLED在车载显示的应用 (08-26)