分布式传感器网络环境的多目标跟踪和特征管理设计
4 分布式多目标跟踪与特征管理算法结构
现在对分布式多目标跟踪与特征管理算法进行详细描述。运用一种信念向量来表示目标的特征。对于多目标的情况下,我们需要运用信念矩阵B(t),其各列由信念向量Bij(t)所组成。因此,向量表示目标j能被t时刻的i所确定的概率。
4.1 多目标跟踪(数据关联)
DMTIM多目标跟踪(数据关联)模块的输出涉及到混合矩阵、状态估计值和本地信息三者的计算。
首先需要求得混合矩阵。假设在观测范围内有K个目标具有K个特征,因此特征管理意味着对多目标的特征进行匹配。对此,运用Identi ty-Mass-Flow的方法。混合矩阵是一个KxK矩阵,其元素Mij(t)表示目标i在t-1时刻变成目标j的概率。而MCMCDA能够在多项式时间下对混合矩阵进行有效地估算。
然后需要对状态估计值进行计算。如上所述,MCMCDA能够对未知数量的多目标进行跟踪,并且能够实现轨迹的发生与终止。在每一个采样时间段,其测量值与前一段的测量值相叠加,从而构造出测量值集合Y。MCMCDA能求出,其值接近多目标跟踪的MAP估计值,以及中所有轨迹的状态估计值。对于每一个轨迹τ∈ω,将它与之前发现的目标轨迹进行比较。如果τ与之前目标轨迹的测量值无任何相同之处,那么我们认定其为新目标。然后,当前传感器τ对于对相邻传感器进行询问,如果相邻传感器对τ已知,那么它的特征将被复制到当前传感器当中。否则,将对τ创建新的特征。最后,当轨迹结束时,对目标特征进行删除。在第4.2节,将对目标数量变化情况下信任矩阵如何实现刷新进行描述。
最后计算表示为信任向量的形式的本地信息。MCMCDA方法能够通过最新的,以及之前的测量值有效地计算出本地信息。当目标和轨迹的数量处于估计值的情况下,本地信息能够被同时计算出来。对于特征值k,定义Njk为时间点个数,第j个最新观测值与之前的观测值合并,观测值在之前的nbi个采样值中由k表征,其中nbi为之前的采样值数量。算法结束时对特征值k计算 。然后根据最新的观测值来对向量进行调整,进而通过γk来形成本地信息。
。然后根据最新的观测值来对向量进行调整,进而通过γk来形成本地信息。
4.2 特征管理
特征管理模块包括信任矩阵刷新和本地信息关联,而多目标跟踪(数据关联)的混合矩阵和本地信息被用来刷新信任矩阵。
信任矩阵刷新模块包含存储在KxK信任矩阵B(t)中的特征信息。信任矩阵的刷新如下:
B(t)=B(t-1)M(t) (6)
可以看出,公式(6)使信任矩阵行、列之和保持不变。然而目标数量的变化使该方法不适用于分布式特征管理。数量的变化有两种情形:目标离开和进人观测区域。目标离开,对传感器中混合矩阵的相应列进行删除;目标进入,又有两种情形:1)目标从相邻传感器区域进入,2)目标从未知区域进入。
而本地信息被运用来降低由香农信息所得的信任矩阵的不确定性。LxK信任矩阵的香农信息定义如下:
接下来的问题是将该信息关联到信任矩阵。信任矩阵具有如下性质:各列之和等于1;各行之后保持不变;各列之和的和与各列之和的和相等。如果将某列替换为本地信息,将无法保证以上性质。当且仅当本地信息能够降低信任矩阵的不确定性时才能与信任矩阵进行关联。
4.3 信息融合
DMTIM算法通过信息融合来计算本地传感器网络的全局信息,具体包括来自不同传感器的状态估计值和特征信任向量的融合。
特征信息(信任向量)的融合能够被表述为最优化的问题。3个不同的成本函数,香农信息(Shannon information),切尔洛夫信息(Chemo ff information),以及莱布勒距离(Kullbaek-Leibler distances)之和代表了不同的性能指标。本文场景中所有的传感器都参与协同工作,因此我们采用香农信息的方法。
假设本地传感器提供了两个信任向量 。香农信息法用计算两个信任向量的凸函数的方法求得一个融合信任向量:
。香农信息法用计算两个信任向量的凸函数的方法求得一个融合信任向量: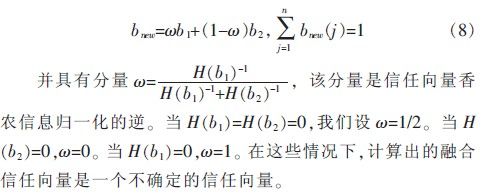
鉴于每个目标可能具有来自不同传感器的多重轨迹,运用轨迹数据融合方法来对多重的轨迹进行合并。设ωi为来自传感器i的轨迹,NBi为包括i并与i相邻的一系列传感器。设Y’={τk(t):τk∈ωj,1≤t≤T,1≤k≤ω"ωj|,j∈NBi}为所有确定目标的一系列观测结果。通过重叠观测区域,可以由Y’得到一系列合并观测结果Y。于是得到一系列新的轨迹ωinit。然后对一系列合并观测结果运行算法,以得出本地稳定的跟踪轨迹,其初始状态为ωinit。
5 仿真结果
在该节中,提供一个简单的场景来说明DMTIM算法的性能。环境中有两个固定传感器--空中交通管制雷达,在二维空间中对多架飞机进行跟踪。假定每个传感器观测范围的半径为10 km,并且当两传感器距离进入20 km的通信范围,它们之间可以实现相互通信。该场景中包含3架飞机,如图4所示。被标注为A和B的飞机首先被预注册,被标注为的飞机对于特征管理系统是未知的。左侧传感器被传感器1所标注,右侧传感器被传感器2所标注。每个传感器中的多目标跟踪模块对目标的数量进行估算,并且对每个已知目标的轨迹进行估算。在图5中,目标数量改变的事件被垂直的点线所标注。在时刻1,传感器1感知到目标1,并且其信任向量为是目标k能够被传感器i所感知并标定为j的概率;同时传感器2感知到它的目标1,并且其信任向量为。在时刻9,传感器1发现新目标(传感器1的目标2),并赋予新值X。同时,传感器2感知到新目标(传感器2的目标2),该目标的特征值和状态估计信息从传感器1转移过来。以此类推,在时刻30,传感器2的目标2离开了传感器2的观测范围,其信息随机从传感器2删除。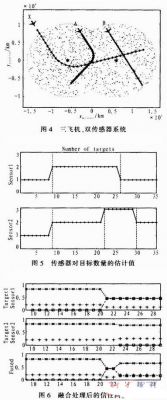
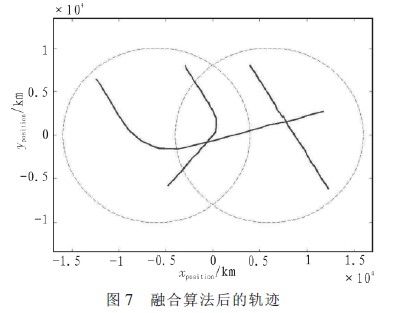
信息融合能够降低目标交叉运动所产生的不确定性。鉴于香农信息效率的优越性,在该试验中我们运用了该方法来实现信息的融合。图6所示为融合的信任向量,图7为实现状态估计融合后各传感器所估算的轨迹。
- 基于S12的无线传感器网络样机系统设计(03-23)
- 基于ARM-Linux的无线气象数据通信系统的设计与实现(06-24)