ARM嵌入式系统在GIS在线监测中的应用
较灵活;其中,最重要的是CAN 通信具有很高的稳定性和性价比,所以在装置的内部采用CAN 实现主板与辅板之间的通信是工业控制装置中最流行的方法。CAN 总线作为ARM 的外围电路,采用了双CAN 模式,这在快速通信的基础上增强了装置内部通信的稳定性。装置中CAN 总线通信电路如图4 所示,SJA1000 为工业级的CAN 通信控制器,82C250 是CAN 总线驱动器,其中4 个光耦是用于光电隔离,以达到减小通信干扰,同时可以实现通信板的带电插拔。
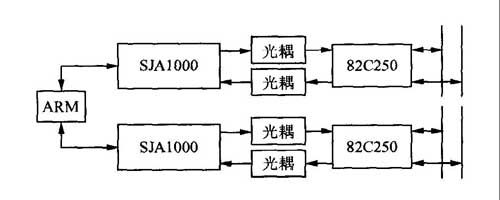
图4 双CAN 通信接口电路
5) 以太网模块
电路中采用CS8900A 工业级以太网芯片,可以达到10Mb/s 的网络速度,在线监测装置通过这部分接口电路与系统的高层(如上位机等) 和其他监测装置进行数据的传输共享,实现互操作。
基于ARM 嵌入式系统的软件框架
系统的软件主要包括3 方面:uCbootloader、uClinux 和应用软件。uCbootloader 用于硬件系统初始化,uClinux 是嵌入式操作系统,而应用程序是用户根据具体要求开发出来实现特定功能的程序模块。硬件系统上电后,运行uCbootloader 对硬件系统配置进行初始化,将检测到的硬件转交给操作系统,由它进行统一支配; 用户程序是建立在uClinux之上,并由它负责引导启动。
1) 嵌入式操作系统uClinux
本装置选用uClinux 作为嵌入式操作系统主要考虑到以下几个因素:
a) 选用的AT9M40800 没有内存管理单元;
b) 对Linux- X 裁剪得到的uClinux 内核很小(约900 kB) ,但仍保留了Linux 系统的稳定性、强大的网络功能和出色的文件系统等优点;
c) uClinux 拥有一个完整的TCP/IP 协议栈,使GIS 监测装置能够实现标准的以太网通信功能。考虑到系统的实时性要求,本系统采用内核加载方式,将内核的压缩文件放在FLASH 上,系统启动时读取压缩文件在内存中解压,然后运行。
2) 用户程序
本嵌入式系统中的所有应用程序是采用标准C语言编写,编译的过程是在Linux 系统下建立的交叉编译器中进行。根据嵌入式系统要实现的功能,应用程序主要分为以下几部分:以太网通信、CAN 总线通信和串口通信程序等。下面仔细讨论一下以太网通信和CAN 总线的通信:
a) 以太网通信
TCP/IP 协议是一种成熟的、广泛使用的高层网络协议,因为它具有良好的开放性,在变电站通信系统中广泛采用。基于TCP/IP 的通信程序主要有两部分:服务器和客户端。服务器和客户端可以运行于上位机与监测装置上,用于收集数据,并发送相应的网络报文。以客户端程序为例,客户端程序主要包括以下功能环节:建立socket 套接字、向server请求连接、封装数据、接收数据和发送数据,最后释放套接字,如下面的程序片断所示。
main ( int argc,char 3 argv[ ])
{ .
sockfd= socket (A F- IN ET,SOCK- STREAM ,0) ;
.
connect (sockfd,&their- addr,sizeof (st ructsockaddr) ) ;
.
send (sockfd,buf,MAXDA TA S IZE,0) ;
.
recv (sockfd,buf,MAXDA TA S IZE,0) ;
.
clo se (sockfd) ;}
b) CAN 总线通信
CAN 总线通信软件主要由初始化程序、发送程序和接收程序3 部分组成。初始化程序设置CAN控制器中的各个寄存器,包括模式寄存器、时分寄存器和输出控制器等。由于这些寄存器只能在复位期间设置,故必须在通信开始之前就对CAN 控制器进行初始化。CAN 发送程序主要是将要发送的信息帧送到发送缓冲区中去,再启动发送命令即可(如图5 所示) ; 接收程序与发送程序类似,只需要将数据从接收缓冲区中取出即可。
在设计CAN 通信模式的时候,采用多主的通信方式,即CAN 总线上每个节点都可以任意地向其他节点发送和接收报文,每个节点上的通信程序具有相似性,故只要把一个节点的通信程序调通后,其他的节点上的通信程序可以仿效之。

图5 CAN 总线发送程序流程图
系统应用测试
1) 系统的互操作性
在GIS 监测装置中建立设备状态数据库,开设服务器和客户端,并实时地更新数据库的状态值。然后启动GIS 在线监测系统,在系统运行中进行互操作性测试,测试得出:a) 以太网的数据传送速度可以达到10Mb/s;b) 监测系统的上位机能够通过以太网对监测装置发送请求和接收数据,实现上位机与监测装置之间的数据共享,即互操作;c) 两台或多台监测装置之间能够通过以太网进行通信,实现必要的数据交换。
2) 监测装置的稳定性
根据IEC1000 标准推荐,采用4 级试验等级对GIS 监测装置进行稳定性的测试。试验内容主要包括工频磁尝高频干扰、静电放电干扰和浪涌干扰等9 项测试,测试结果表明监测装置存在部分电磁兼容设计缺陷。但是,经过装置结构局部调整之后,可以达到IEC1000 的4 级标准;
- 基于ARM的除法运算优化策略(01-14)
- 基于ARM的CAN总线智能节点的设计(01-24)
- ARM基础知识教程五 (02-08)
- ARM基础知识教程六(02-08)
- ARM基础知识教程七(02-08)
- ARM基础知识教程八(02-08)